
毫末获全球nuScenes纯视觉目标检测无外部数据榜单第一名!
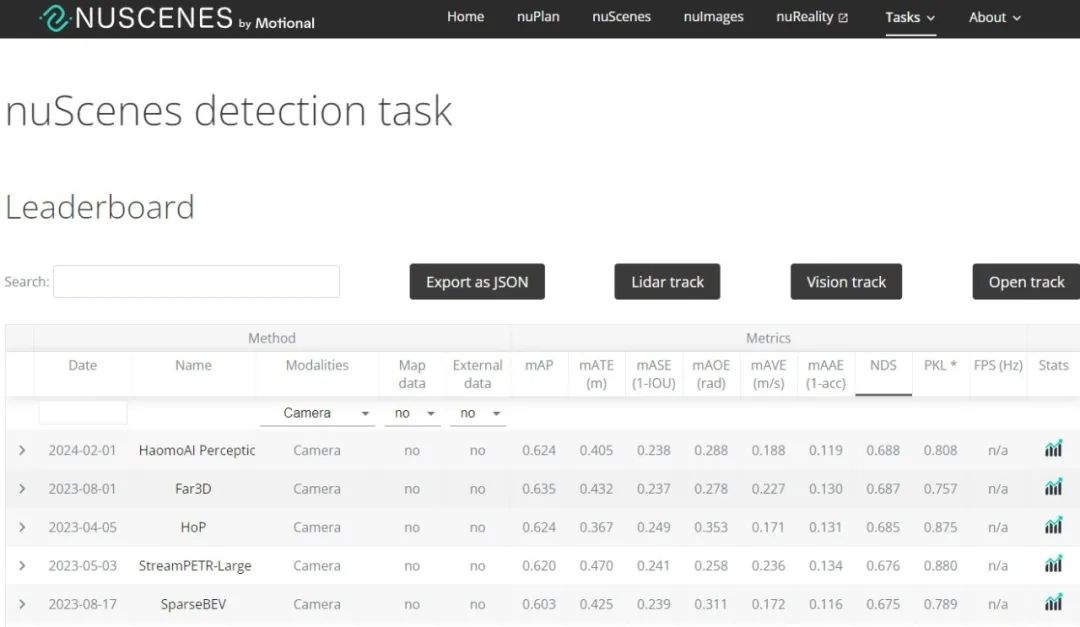
近日,在全球权威的自动驾驶 nuScenes 竞赛的最新评测中,毫末智行获纯视觉 3D 目标检测任务(nuScenes Detection task)无外部数据榜单第一名,并将关键性指标 nuScenes Detection Score(NDS)提高到68.8%。
自动驾驶纯视觉感知算法已经成为行业的热点,如何提高基于视觉的 3D 障碍物的精度和准确度成为当下核心的技术挑战。毫末在此项检测任务中主要使用了两种方法:
一种是基于 NeRF 的三维建模方法,并基于此方法设计了深度分支网络模型来输出深度伪标签;
第二种是由 SEEM 监督的语义分支网络来输出语义伪标签,最终结合深度伪标签、语义伪标签来提升检测效果。
nuScenes 数据集是目前自动驾驶领域中最流行的公开数据集之一,数据采集自波士顿和新加坡的实际自动驾驶场景,是第一个集成摄像头、激光雷达和毫米波雷达等多种传感器,实现360度全传感器覆盖的数据集。
nuScenes 数据集提供了二维、三维物体标注、点云分割、高精地图等丰富的标注信息,包含1000个场景,拥有140万帧图像、39万帧激光雷达点云数据、23个物体类别、140万个三维标注框,其数据标注量比 KITTI 数据集高出7倍以上。
所谓纯视觉 3D 目标检测任务,就是在不使用激光雷达、毫米波雷达等额外的传感器信息条件下,仅使用6个摄像头完成车外360度环视视野的3D目标检测,不仅需要检测周围环境中所有的车、行人、障碍物、交通标志、指示灯等若干类对象,还要精确感知到他们在真实物理世界中的位置、大小、方向、速度等信息。该项任务的主要难点是通过 2D 图像难以准确的获取目标的真实深度和速度,当提取的深度信息不准确时,一切的三维感知任务都会变得异常困难;而当提取的速度信息不准确时,则可能会对后续的决策规划任务产生致命性的影响。
得益于更先进算法和更高算力的进步,nuScenes 竞赛的 3D 目标检测任务榜单成绩不断取得提升,其中毫末 AI 技术团队将关键性指标 NDS 提升到68.8%,充分展示了其在自动驾驶技术领域的实力。



评论排行