来源:网络 2012-07-05 关键词:自动化系统 自动控制
PLC 水处理 引言 在钢铁厂污水排放中,水中含有大量的废渣和油,如果将废渣和油从水中分离出来后,水就可以进行第二次利用,提出的废渣还可以送到下一个工序进一步将里面的铁提炼出来,这样就大大地节约了水资源,又防止了环境污染;利用GLM-8型行架式刮油刮渣机是对钢铁厂污水处理方法中的一种。下面将对该污水处理系统做简要论述。 一、工艺流程 GLM-8型行架式刮油刮渣机主要由驱动机构、行架、刮油耙,刮渣耙、自动控制系统、定位器组成。 沉淀在平流池池底的泥渣在刮渣耙的带动下,逆水由平流池出水尾端向进水首端行驶CONTROL ENGINEERING China版权所有,将泥渣带入首端的集泥坑,刮渣机行到首端时,自动控制系统指导抬落耙机构的电动推杆进行工作,由于刮油耙和刮渣采用联动,当刮泥耙抬出250mm高度时,刮油耙自动下降250mm,刮油刮渣机实行反向行驶,将浮在平流池上的油由平流池首端向尾端推动,将油刮入设在尾端的集油槽内排出平流池。从而实现一次全过程工作,刮油刮渣还可根据平流池的沉降过程进行半程工作两到叁次再进行一次全程工作,具体运行轨迹见图一,该系统可以根据需要通过面板上的选择开关选择三种运行轨迹控制工程网版权所有,图一中只画了一个周期。
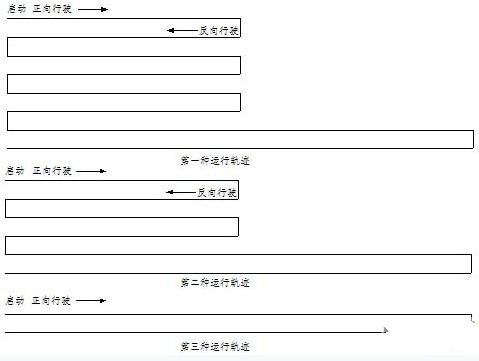
图一:运行轨迹图 自动控制系统设有现场手动、自动和远程控制接口。当刮油刮渣机出现故障时,设备现场声报警装置进行报警,并通过信号通信系统将信号送到中控室报警。 设备的输电系统采用电缆输入电源和信号控制电缆输出信号,电缆在运行过程中悬挂在空中的电缆滑车上,电缆滑车在行架式刮油刮渣机的带动下沿着滑车轨道进行往返工作。 当设备的自动控制系统出现失控时,刮油刮渣机行驶到端头而不能实行反程工作时,可通过设在首尾两端的限位控制装置切断电源,如上述系统全部失控时,设在首尾端的车挡强制将设备控制在限位范围内,从而控制了设备出轨等事故的发生。 二、控制系统说明 3.1硬件说明 该控制系统所用的中央处理器为西门子公司的CPU224 AC/DC继电器输出。S7-200系列是一种可编程逻辑控制器(Micro PLC)。它可以控制多种多样的自动化工业的应用,它紧凑的设计,低廉的价格,以及强大的指令,使得S7-200控制器可以近乎完美地满足小规模的控制要求。此外,丰富的CPU类型和电压等级使其在解决用户的自动化问题时,具有很强的适应性,该控制系统所用的是S7-200系列,不过也可通过该模块上的PROFIBUS-DP接口,通过现场总线将该小系统组态到大系统中。该系统中的CPU224的I/O分配如下表:

控制系统原理框图见图二。
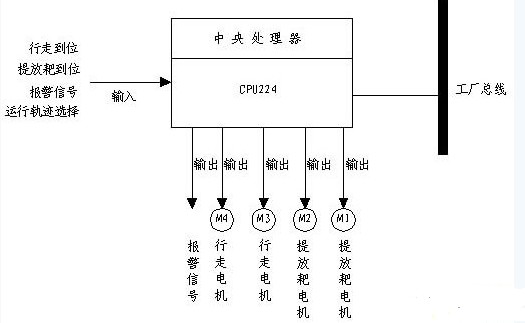
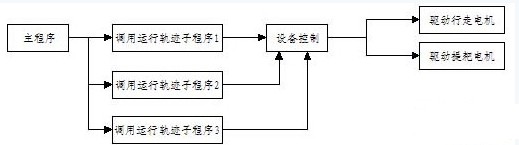
图二: 控制系统原理框图 3.2软件说明 该控制系统软件采用西门子公司的STEP7-MICRO/WIN32的软件编写,PLC控制系统使用功能控制语言,可用多种方法,如梯形图(Ladder)、语句表(STL)、功能图块(FBD)进行设计,软件开发、调试和维护采用多种方法,可有效利用软件资源。 该系统主要用到了子程序调用指令,在主程序中根据用户需要对三种运行轨迹的三个子程序进行调用,从而让刮油刮渣机在不同的条件下运行不同的轨迹。 每一种运行轨迹都是通过软件完成,充分利用了计数、定时等指令,程序流程图如下(图三):
三、应用效果 该控制系统从安装调试成功后,于2001年8月通过甘肃酒钢集团的验收。目前控制系统运行稳定可靠,且操作简单、直观;可实现远距离维护功能,从而减轻了维护强度,故障处理更方便、快速。 参考文献: 1、S7-200编程手册[P] 1998版……………………西门子公司 2、电机拖动[M] 1996版……………………………冶金工业出版社



评论排行