时间:2012年5月1日 来源:互联网 关键词:伺服系统 过载报警 消除方法 一.过载的原因 伺服放大器内部的智能功率模块IPM(Intelligent Power Module)内藏有过电压,过电流和过热等故障检测电路,所以当电机驱动负载在加速或者减速过程中,电机的输出力矩大于电机的额定力矩并持续较短时间后,放大器就会有过载报警。 下面以定位模块QD75控制MR-J2S伺服放大器为例进行说明
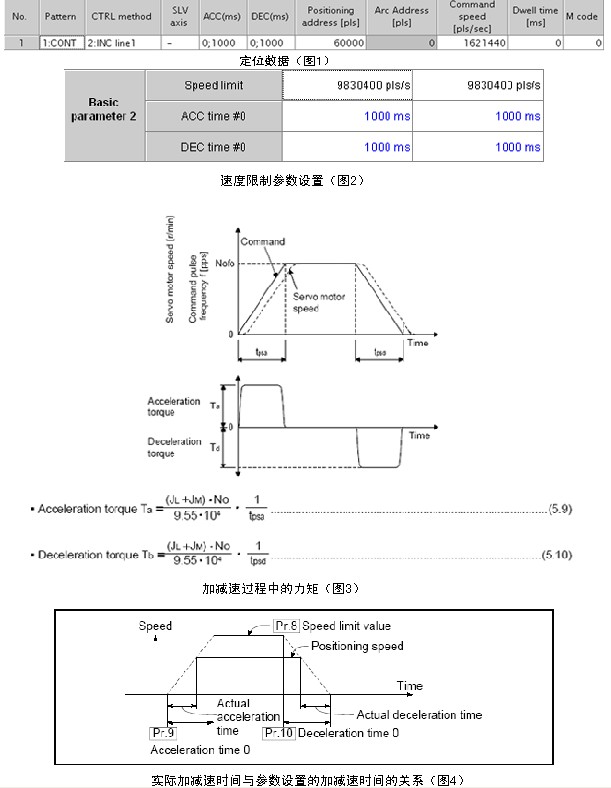
图3中的马达速度No对应图1中的速度指令(Command speed ),加减速时间tpsa和tpsd对应图4中的实际加减速时间。已知了负载惯量和电机惯量,就可以计算出加减速力矩Ta和Tb。由图3所示。
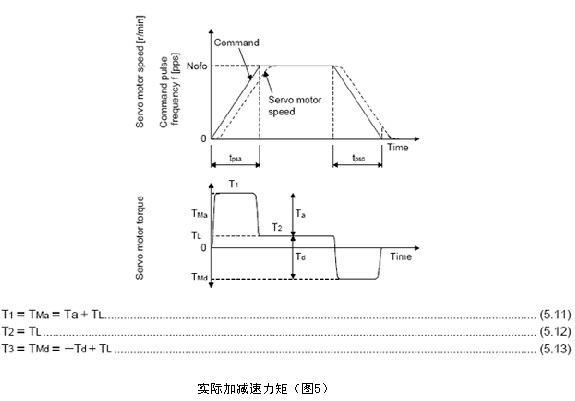
与加减速的输出力矩相比,电机在带动负载在运行中的输出力矩是最小的,用TL表示。这个值可以用伺服设置软件在监控
伺服电机输出力矩曲线上可以监控到。那么由图5可以计算出电机在加速,运行和减速过程中的输出力矩T1,T2和T3。 伺服放大器在下面两种情况下会有过载报警发生 1. T1,T2和T3由一个超过伺服电机的最大输出力矩 2. T1,T2和T3大于伺服电机的额定输出力矩,但小于最大输出力矩,且运行一段时间
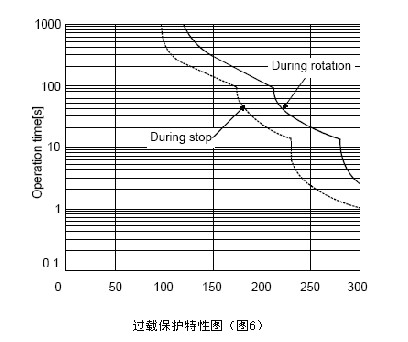
以MR-J2S-10A~MR-J2S-100A过载保护特性图为例进行说明,当伺服电机输出力矩为200%额定力矩时,如上图所以电机运行大约100s后伺服放大器内的IPM就会因为过热而出现过载报警。 二.消除过载报警的方法 上述说明了产生过载报警的原因,那么只要减小运行速度或者增大加减速时间就可以消除报警。




评论排行