
【ZiDongHua 之创新自化成收录关键词: 人工智能 控制领域 生成式控制】
未来触手可及:生成式控制方法颠覆传统控制技术
生成式控制是一种利用生成式人工智能模型完成系统控制的方法。它通过大量的系统控制数据,训练得到能够生成与训练数据分布相似的新数据的模型,并使用定点迭代的推理算法来提取给定输入条件下的系统控制参数。所有的生成式模型都可以写成如下的形式:
其中是数据中的一个样本, 是一个生成式神经网络并写作一个函数, 符合概率分布 ,生成式模型是一个从随机概率分布到样本分布的映射。
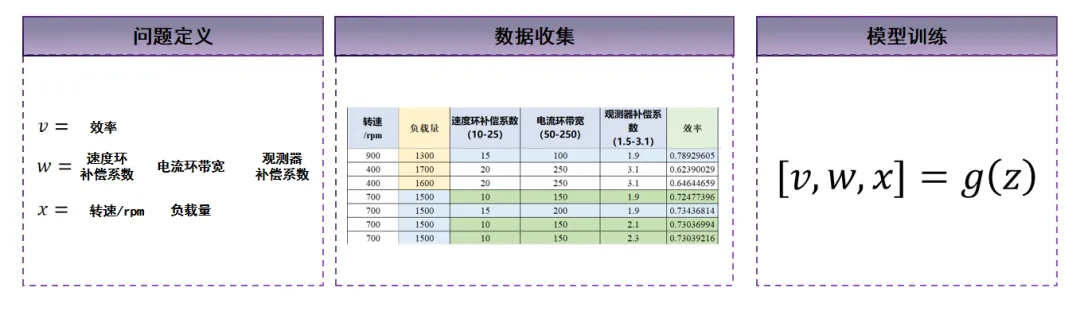
利用噪声注入和表征归一化的自编码器对抗训练方法(Adversarially-Trained Normalized Noisy-Feature Autoencoder),可以得到如上述公式那样的显性映射,从而构建了更直观的生成式模型。从生成式模型的通用形式出发,用于控制的模型只需要将拓展成三个部分:
其中是需要最小化的控制目标,是需要输出的控制参数,则代表能够为控制问题提供信息的输入信号。
在训练过程中,这一模型需要大量的 样本,每个样本表示给定控制参数和输入信号时的控制目标值。经过训练后,可以得到一个模型(一般是一个神经网络),能够通过抽样来得到符合数据分布的样本。
生成式控制算法可以为不同工业领域提供支持,并且能够适应多目标、不确定性等复杂场景。在控制领域,传统控制方法与生成式控制方法呈现出鲜明的对比。传统控制方法依赖于深厚的算法专业知识,它们通常在单一本体系统中运行,这种结构使得参数歧义性较小,控制过程因此更加可解释。
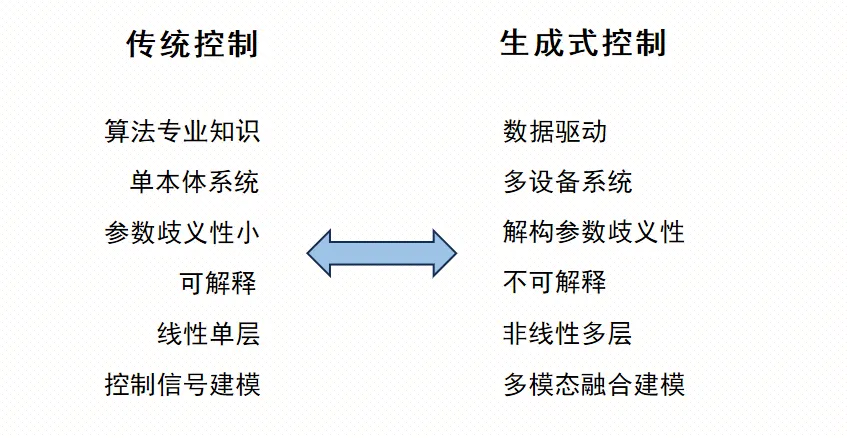
此外,传统控制往往采用线性和单层的设计,专注于对控制信号进行精确建模。相比之下,生成式控制方法则以数据驱动为核心,它们能够在多设备系统中运行,处理复杂的参数歧义性,但往往缺乏可解释性。生成式控制通常采用非线性和多层的结构,能够进行多模态融合建模,以适应多变的环境和任务需求。
张翔博士对生成式控制算法进行探索并进行了抽象性总结,他表示:团队以及本人仍然在快速地尝试将这一方法应用到不同的工业领域中去,目前还未明确找到其限制。




评论排行