
清华大学机械系胡楚雄课题组在高阶积分链系统最优控制取得进展
【ZiDongHua 之自动化学院派收录关键词: 清华大学 控制领域 集成电路 机器人】
清华大学机械系胡楚雄课题组在高阶积分链系统最优控制取得进展
高阶积分链系统在全状态框约束和任意指定终端状态下的时间最优控制,是最优控制和轨迹规划领域的国际经典理论问题,目前三阶及以下问题能够得到求解,四阶及以上问题在任意指定终端状态下难以高效求解近优解。近日,清华大学机械系胡楚雄教授团队针对该问题原创了增广切换率(augmented switching law, ASL)理论,能够紧凑表征任意整数阶问题最优控制及切换流形;基于该理论,进一步提出了流形拦截法(manifold-intercept method, MIM),能求解三阶及以下问题的最优轨迹和四阶及以上问题近优可行轨迹,该算法适用于任意整数阶问题的轨迹规划。数值实验表明,MIM在三、四阶问题中均能实现100%成功率,其中三阶问题能够在计算时间低于现有最优算法Ruckig(插补误差级别精度)情况下实现舍入误差级别精度,在四阶问题中相比现有基于优化算法SOCPs和Yop计算时间降低2个数量级、计算误差降低79%以上、轨迹颤振率抑制90%以上。研究工作不仅在理论上揭示了高阶问题最优控制切换方式,而且从算法层面高效规划了此前难以实现的任意整数阶近优轨迹,并对于集成电路制造、机器人、数控等工业场景下的轨迹规划具有重要的实际意义。
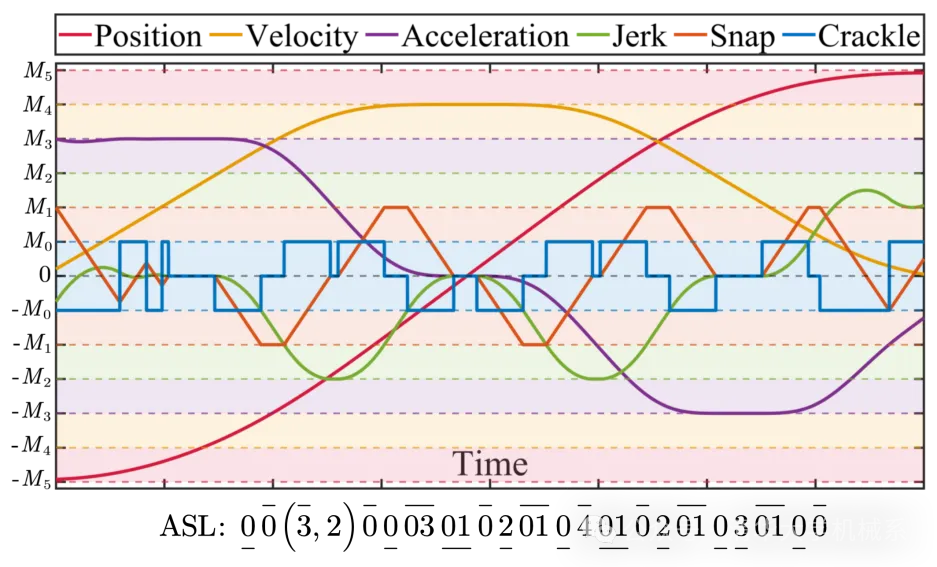
图1. 所规划五阶轨迹及其增广切换率,其中初始状态及终端状态均不为零
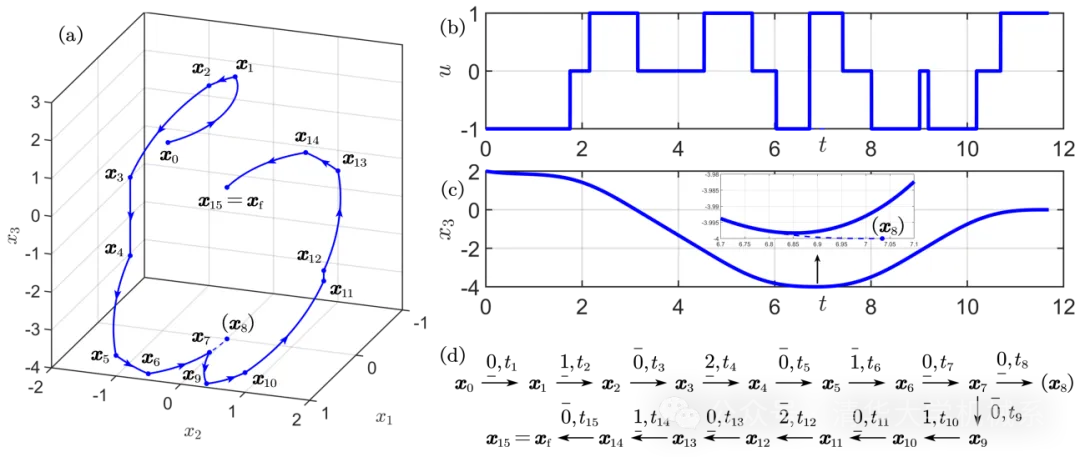
图2. 所规划四阶轨迹及其流形拦截结构
该成果以长文形式,在线发表于控制领域国际顶级期刊《IEEE自动控制汇刊》(IEEE Transactions on Automatic Control),题目是《全状态约束和任意终端状态下的高阶积分链系统时间最优控制》(Time-Optimal Control for High-Order Chain-of-Integrators Systems with Full State Constraints and Arbitrary Terminal States)。清华大学机械系胡楚雄教授团队2022级博士生王煜楠为论文第一作者,胡楚雄教授为论文通讯作者。研究得到国家重点研发计划的经费支持。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:控制领域微信群、集成电路微信群、机器人微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:控制领域微信群、集成电路微信群、机器人微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


》(Cybernetics and Intelligence)英文期刊揭牌|第二届控制与智能清华论坛举办")







评论排行