
国地中心联合清华大学发布便携式人形机器人通用末端采集系统成果,并将发布相关标准
联合发布︱国地中心联合清华大学发布便携式人形机器人通用末端采集系统成果,并将发布相关标准
引言
当下,人形机器人技术正以前所未有的速度改变着我们的生活与工作方式。作为该领域的核心议题之一,人形机器人的数据收集技术正日益受到广泛关注。如何高效收集数据,特别是高精度优质数据,成为学术界及产业界高度关注的问题。
国地中心通过梳理行业内数据收集的常用方式分析当前痛点,首次发布自主研发的便携式人形机器人通用末端采集系统亮点,并计划联合清华大学共同发布《便携式人形机器人通用末端采集系统》标准。
人形机器人数据收集的行业现状
当下,人形机器人的遥控操控技术正以前所未有的速度发展。其中,外部捕捉技术作为遥控操控的核心手段,正逐步成为连接人类与机器人之间的桥梁。该技术通过捕捉人类双手的位置信息,实时同步控制机器人双臂末端的位姿,进而完成复杂的运动学解算。目前,行业内主要采用以下三种外部捕捉方式:
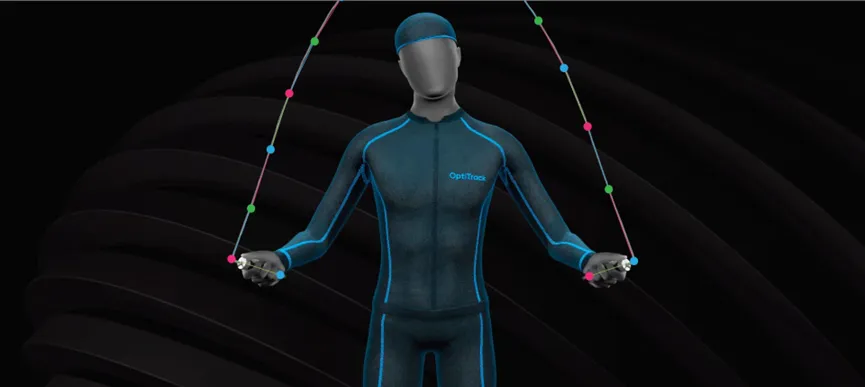
(1)全身光学动态捕捉
这一技术依赖于精密复杂的光学摄像头系统,基于计算机视觉原理,能够全方位、多角度地追踪目标特征点,实现全身动作的精准捕捉。其显著优势在于高精度、高动态性能以及全身关节数据的全面采集。然而,高昂的设备成本以及复杂的刚动力学计算力反馈机制,限制了其广泛应用。
(2)惯性动作捕捉+视觉
该技术结合了惯性传感器(如陀螺仪、加速度计等)与视觉技术的优势,能够实时感知并记录关节的角度变化、加速度和角速度等关键运动信息。其特点在于较高的精度以及头部和手臂数据的全面收集。但稳定性不足、运动范围受限以及缺乏力反馈机制,成为其亟待解决的问题。

(3)运动手套
运动手套通过集成多种传感器,精准采集佩戴者的手部动作数据,并用于驱动或模拟人形机器人的动作。其优势在于手部数据的精确度高,为机器人操作提供了精细的控制能力。然而,稳定性差、启动标定繁琐以及便捷度不足,成为制约其发展的瓶颈。

尽管上述三种采集方式在VR和人体数据分析领域取得了显著成果,但它们并非专门针对人形机器人操作或数据采集而设计。手部作为人形机器人作业操作的末端执行器,其数据采集质量直接关系到机器人的操作精度和效率。因此,对通用机器人末端采集器的需求愈发迫切,亟待行业内外共同探索和创新。
UMI数据收集框架的优势及劣势
UMI(Universal Manipulation Interface)数据收集框架作为当前机器人领域的一项重要技术,为机器人数据采集提供了强有力的支持。
强项
高精度与高实效性:UMI结合了最先进的SLAM技术与GoPro内置的IMU数据,能够高精度捕捉动作,且通过彻底的延迟匹配,为动态动作(如投掷)实现了现实世界可部署的策略。这确保了从人类演示到机器人执行的实时性和准确性,为机器人操作提供了可靠的数据支持。
便携性与低成本:UMI采用手持式夹持器和精心设计的界面,实现了便携式、低成本和信息丰富的数据收集。同时,UMI的学习策略与硬件无关,可部署在多个机器人平台上无需进行额外的适配或调整,降低了用户的使用门槛。
多功能性及泛化能力:UMI框架解锁了机器人操作的新功能,只需更改每个任务的训练数据,即可实现零样本可泛化动态的、双手的、精确的和长程类任务。这使得UMI能够应对各种复杂的操作任务,为机器人领域的发展注入了新的活力。
不足
力反馈能力匮乏:UMI的手持式夹持器设备由于缺乏必要的力反馈功能,导致在数据采集过程中难以精确调控夹持力度,增加了损坏风险,并严重限制了数据采集在力反馈维度上的全面性和准确性,这成为制约UMI进一步发展的关键因素之一。
视觉定位误差:UMI手持式夹持器定位受光照、环境纹理、视野大小、采集姿态、采集速度等因素影响,视觉定位易出现误差,导致位姿不准确,影响数据集精度。
国地中心便携式人形机器人通用末端采集系统的优势
国家地方共建人形机器人创新中心基于UMI开发的便携式通用机器人末端采集系统,主要特点包括:
电动控制:通过扳机控制电机带动夹爪开合,替代传统机械扳机,大幅提升了夹爪操作的便捷度及数据采集的效率。这一创新设计使得用户能够更轻松地完成数据采集任务,提高了工作效率。
力反馈能力:通过读取电机数据获取实时力反馈,无论物体软硬均能实现有效夹取。这一功能扩大了系统的使用场景,使得系统能够应对更多需要力反馈的操作任务,增加了数据集的多样性。
实时夹爪开合位置反馈:通过读取电机数据解算夹爪开合的精确位置,替代视觉位置解算,提高夹爪行程反馈精确度,减少了算力要求。这一设计使得系统能够更高效地处理数据,提高了系统的整体性能。
快拆电池:采集设备能够快速更换电池,无需外部供电,扩大了使用场景。这一功能使得系统能够在各种环境下稳定运行,提高了系统的灵活性和可用性。
SLAM性能提升:在设计过程中提出了一种基于VINS-Mono的视觉惯性里程计(VIO)改进方案,具有更小的体积、更高的定位精度、回环与重定位功能以及卓越的鲁棒性。这一创新设计使得系统能够以较高速度,更多姿态进行数据采集,并且在背景特征不丰富环境下(如桌面,地面)实现更精确的定位和导航。
国地中心下一步计划
国家地方共建人形机器人创新中心作为国家级的人形机器人平台,肩负着引领行业标准的责任。基于本产品的创新型设计,国地中心计划联合行业头部单位,共同制定《便携式人形机器人通用末端采集系统》标准。通过对数据采集系统的术语和定义、系统结构、系统功能要求、软件硬件要求、安全防护以及试验方法等多个方面形成标准,致力于解决异构平台泛化、场景迁移数据采集难等问题。
同时,国地中心也将联合清华大学不断优化便携式通用机器人末端采集系统的性能,目标形成成熟的产业化产品,为行业提供更优质、更高效的数据采集方法,推动行业的快速蓬勃发展。
未来展望
展望未来,国地中心将继续深化探索多模态融合技术,推动人形机器人技术的不断创新和发展。同时,国地中心与清华大学将基于便携式人形机器人通用末端采集系统,持续开展与国内外研究机构、企业的深入合作,共同推进人形机器人产业的发展。我们相信,在国地中心的不懈努力和行业内外的共同支持下,人形机器人技术将不断取得新的突破和成就。
修改于2024年12月13日
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:计算机视觉微信群、传感器微信群、国地中心微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)



微信联盟:计算机视觉微信群、传感器微信群、国地中心微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)



正式成立!")






评论排行