
用于自动化介入治疗! 澳门大学研发多机器人磁导航与多节磁控软体机器人系统
【ZiDongHua之自动化学院派收录关键词:澳门大学 生命科学领域 机器人自动化 磁导航系统 】
用于自动化介入治疗!澳门大学研发多机器人磁导航与多节磁控软体机器人系统
在现代城市化和生活方式不断改变的背景下,心血管疾病(如动脉硬化、脑血栓等)已成为全球范围的主要健康威胁。现有心血管微创介入手术主要依靠医生手动操作导管来完成,该手术对医生的操作经验要求较高,并且易受X-ray的辐射伤害。为克服该难题,澳门大学科技学院智能与微纳系统实验室的李政阳博士、徐青松教授研制出一种多机器人协作磁导航系统,并提出一种多节磁软体机器人用于血管介入手术,有望以自动化的方式代替现有的手动介入方案。相关成果以Multi-Section Magnetic Soft Robot with Multirobot Navigation System for Vasculature Intervention为题发表在中国科技期刊卓越行动计划梯队期刊Cyborg and Bionic Systems上。
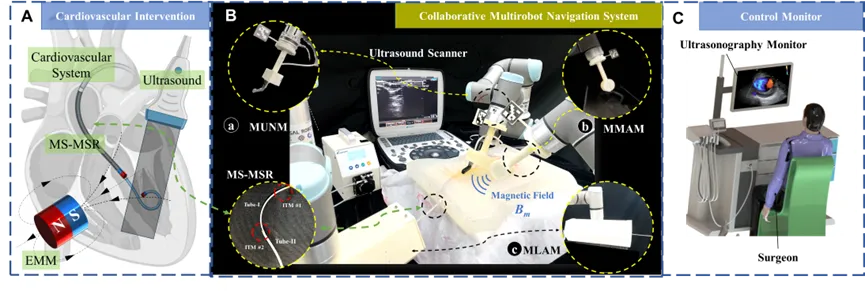
图1.多机器人协作磁导航与多节磁软体机器人系统
▍研究背景
近十年来,软体机器人因其灵活性和快速响应性得到长足发展,并促进了在微创手术中的广泛应用。尤其在心血管介入手术中,传统方法采用手动操控的导管在X-ray造影成像的引导下将药物/支架输送到靶点(如血栓和动脉瘤等),然而该方法要求介入科医生拥有很高的操作技巧,而且医生与病人遭受辐射损伤。为解决上述手动介入方法的缺点,自动化的机器人辅助血管介入提供了一种新途径。然而,现有的线驱动导管机器人具有一定局限性(如线驱动的迟滞特性和较粗的结构尺寸),限制其应用于更具挑战性的体内场景,例如微小血管的介入治疗。
▍主要挑战
磁控软体机器人(Magnetic Soft Robots)具有优于线驱动的小型化和非接触式遥操作磁控制的特点,成为新的研究热点。研究人员尝试运用磁控软体机器人进行自然腔道内和血管内手术,但是仍有若干关键挑战需要解决。
(1)由于人体血管的分布复杂,最近出现了关于磁控软体机器人的设计研究,以满足微创介入手术的要求。这些磁控软体机器人试图改变传统磁软体机器人的单管形状结构,采用多节/同心管、变刚度、螺旋形等,以提高临床疗效等相关功能,这些设计均需通过实验以检验在复杂介入手术中的可行性;
(2)软体机器人的逆运动学建模可以采用分段常曲率理论(PCC)、欧拉-伯努利理论(E-B)等。当考虑外部载荷(例如磁力/力矩)时,PCC和E-B理论因其离散化而不适用于动态血管内的应用。考虑到多节结构的特点,所期望的复合曲率和工作空间应在优化过程中同时解决;
(3)固定式的磁导航系统应用于介入手术时存在工作空间有限、占地规模较大等缺点,而移动式磁导航系统具有远距离传输的优点,且具有高灵活性、可移动性等优势。然而,采用多机器人磁导航系统来控制与追踪在血管中的磁软体机器人仍具有很大挑战。另外,冗余的多自由度运动增加了控制系统的设计难度。
因此,需要结合多节磁软体机器人与多机器人磁导航系统的特点,针对性地进行运动学建模与控制器设计,并通过在模拟介入环境中,验证所提出方法的可行性。
▍主要发现
(1)提出一种由多机器人磁导航系统导航的新型多节磁软体机器人,用于超声引导的自动化血管内介入手术(图1)。
(2)构建了基于优化的Cosserat Rod的多节磁软体机器人运动学模型,分析了其在移动非均匀磁场驱动下动态模型的最优规划(图2)。
(3)对于多机器人磁导航系统开发了基于二次规划(QP)优化的分级运动控制器,以规划各机器人与磁控软体机器人的理想运动轨迹。
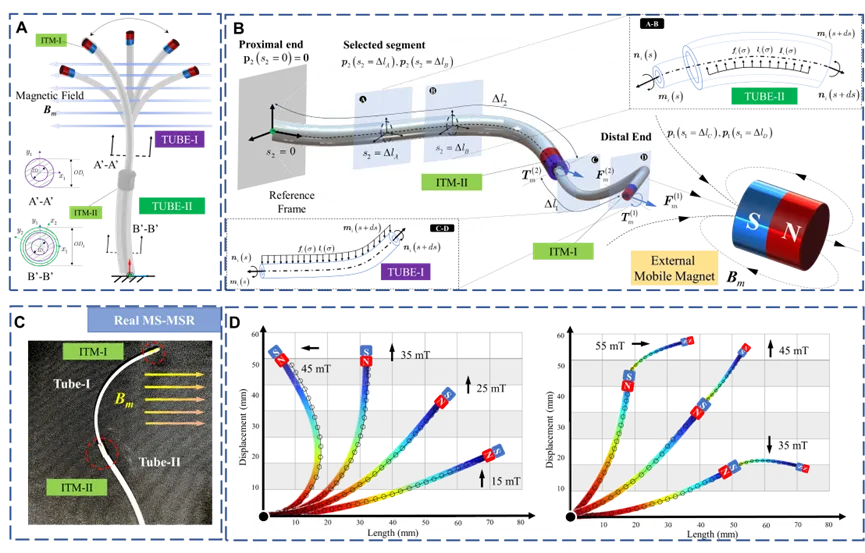
图2.基于Cosserat Rod理论的多节磁软体机器人在不同状态下的运动学建模
▍核心技术亮点
(1)多机器人磁导航系统与磁控软体机器人设计与工作原理:多机器人辅助导管介入系统(CMNS)的设计旨在实现自动化的血管内介入治疗。该多机器人辅助导管介入系统由磁控软体机器人(MS-MSR)、外部移动磁场机器人(MMAM)、体外移动超声机器人(MUNM)、进给运动机器人(MLAM)等多个机器人组成(图1)。磁控软体机器人由两段不同直径的PDMS套管组成,每根软管的末端集成一个永磁体,所产生的磁力/力矩使磁控软体机器人弯曲。
(2)基于Cosserat Rod的磁控软体机器人优化建模:由于多节磁控软体机器人在介入术中靶向应用时,其运动学求解需要准确、快速、稳定的数值化方法,并能够解决大挠度、接触和摩擦等问题。作者在考虑计算效率的同时,术中建模基于Cosserat Rod提出了一种形状特性模型,将磁控软体机器人作为细长杆或梁,在优化控制方面采用势能最小化,以求得最优解(图2)。
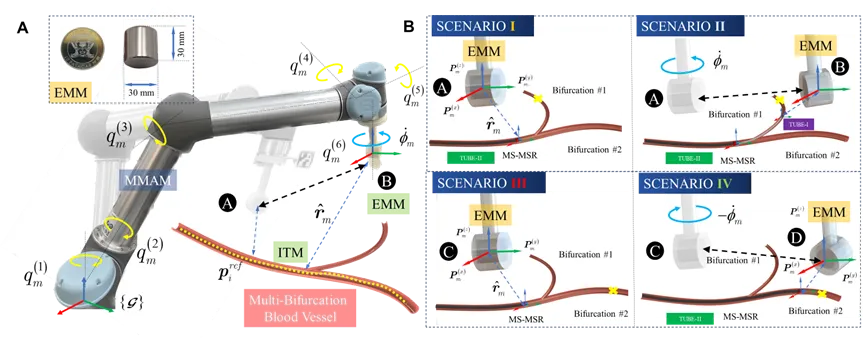
图3.考虑介入运动的移动磁源与磁软体机器人的运动规划
(3)移动非均匀磁场与磁控软体机器人在血管环境中的作用:将永磁体集成于多自由度机械臂的末端,使其产生非均匀驱动磁场,同时磁控软体机器人在人体的血管中运动,当运动到血管的分叉位置时,通过磁力/力矩与距离间的关系,对移动机械臂进行位移规划,以使磁控软体机器人选择正确的血管分支,从而到达靶点(图3)。
(4)基于二次规划(QP)的多机器人控制系统设计:多机器人磁导航系统由多个子机器人组成,需要协同运动才能完成介入手术。由于系统中存在多自由度的运动,而且各个子模块间的运动相互耦合,因此需要一种高效的控制算法来实现协同运动,避免碰撞,以保持同步。为解决这一多机器人冗余系统的协同运动问题,研究团队提出一种基于二次规划的多机器人协作控制器,以解决多机器人系统中存在的协同运动、碰撞避免和同步保持的优化问题(图4)。
▍实验验证
为验证及定量评价多节磁软体机器人的运动学和动力学特性,作者通过力测试实验确定挠度与近端固定的关系,以验证基于优化后的Cosserat Rod模型。结果表明,多节磁控软体机器人能够稳定地跟踪参考轨迹,其每个尖端轨迹的跟踪误差分别为1.32 mm和1.86 mm,标准差为0.45 mm(图5)。
由于多节磁软体机器人可以实现多曲率弯曲,研究团队采用一系列3D环来模拟约束和复杂的环境运动,进一步验证了其动态灵巧性。例如,进行了由非均匀旋转磁场导航的血管内环境测试实验。结果表明,多节磁控软体机器人可以在3D多环结构中精确地进行导航,并到达目标位置(视频1)。在10次实验中,平均穿环完成时间为96.50±2.42 s。
视频1.通过三维曲折路径穿环实验验证多节磁软体机器人的自主导航能力
视频2.磁导航与超声跟踪下多节磁软体机器人在的体外血管模型介入实验
此外,为了验证所提出的多节磁软体机器人和多机器人磁导航系统在血管内的控制与介入效果,进行了体外磁导航和超声术中跟踪的实验验证。多节磁控软体机器人在一个多分支血管模型中进行介入运动(视频2)。通过移动磁源不断调整其姿态,将多节磁控软体机器人纳入有效磁场范围内。采用所提出的优化的Cosserat Rod模型对术中多节磁控软体机器人形状进行估计。与未优化的方法相比,其计算时间为0.23 s,平均估计误差为3.35◦。结果表明,多节磁控软体机器人能够在多机器人磁导航系统的引导下到达预定靶点。
▍未来展望
总结而言,本文主要贡献在于提出了一种多机器人磁导航系统与多节磁控软体机器人系统,对其进行优化建模与控制。通过实验研究,研究团队成功验证了多机器人协作手术机器人系统在超声引导下的高效操作。该系统凭借精确的控制和实时的监测,能够确保导管沿预定路径精准移动,保障手术操作的安全性和成功率。该技术突破为自动化介入手术领域提供了一种可靠的导航和控制解决方案。
论文信息:Zhengyang Li,Qingsong Xu*.Multi-Section Magnetic Soft Robot with Multirobot Navigation System for Vasculature Intervention.Cyborg Bionic Syst.2024;5:0188.DOI:10.34133/cbsystems.0188
论文地址:https://spj.science.org/doi/10.34133/cbsystems.0188
期刊简介
Cyborg and Bionic Systems《类生命系统(英文)》期刊是由北京理工大学(BIT)和美国科学促进会(AAAS)/Science共同打造的综合性高水平国际化英文科技期刊,主要涵盖机器人、生物医学工程及神经工程三大交叉领域,主编为中国工程院院士王振常教授。文章于2021年1月正式上线,入选“中国科技期刊卓越行动计划二期英文梯队期刊”和“2024年度支持北京市高水平国际科技期刊建设储备项目(强刊提升)”,已被SCIE、EI、Scopus、Pubmed、DOAJ、中国科技核心期刊等数据库收录,2024年6月公布的JCR报告中IF=10.5。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:生命科学领域微信群、机器人自动化微信群、磁导航系统微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)



微信联盟:生命科学领域微信群、机器人自动化微信群、磁导航系统微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)


联合沙利文、兆维科技、西比曼生物科技正式发布《2025中国生物药出海趋势蓝皮书》")




评论排行