
雨雾挑战?激光雷达:让智驾视野更清晰,安全再升级
【ZiDongHua 之驾驶自动化收录关键词:禾赛科技 激光雷达 新能源汽车 自动驾驶 】
雨雾挑战?激光雷达:让智驾视野更清晰,安全再升级
今年 5 月份,一辆使用 FSD 驾驶的特斯拉在浓雾中没能识别前方的火车,危急时刻是车主反应过来才紧急转弯万幸没有撞上火车。1
特斯拉FSD在浓雾中未能识别火车
这样看来,纯视觉在雨雾天难以保证稳定的感知,那么激光雷达在雨雾天表现如何呢?
无论是人类驾驶或智能驾驶
雨雾天的感知都是痛点
雨雾大大降低能见度,视线变模糊后,驾驶系统对路况判断力明显下降。光线经过雨雾衰减之后,只有近距离的物体反射光才能到达车辆,比如强浓雾的能见度小于 50 米。视距明显变短后,系统对距离的判断会与实际情况相差很大,很容易发生与前车相撞事故。
统计数据表明,30% 的交通事故由恶劣天气导致,高速公路上约 70% 的事故是发生在雨雾天气。2
激光雷达算法实测
在雨雾天依然稳定感知
与普遍认知不同的是,在中小雨雾的环境下,激光雷达仍然能持续工作,为车辆提供稳定的感知数据。
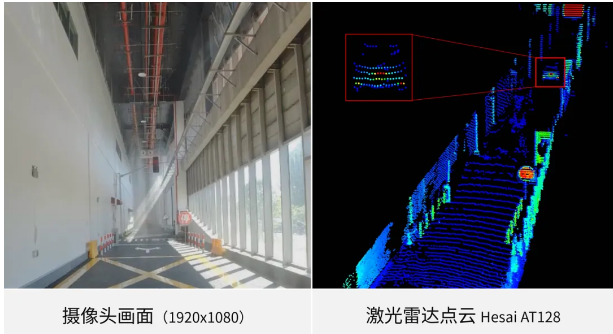
禾赛麦克斯韦智造中心为激光雷达的点云测试建设了专业的雨雾测试道,测试发现:
在同等雨雾条件下,在距离前车 50 米时,摄像头画面已明显难以辨别出前方车辆的情况下,激光雷达点云画面仍然能高清呈现前方汽车,有效的数据点远超出算法感知所需。
同时,禾赛大量真实道路测试表明,在小中雨和中等雾天,尽管激光雷达的测远能力会有一定程度的下降,但对车辆、行人重要目标仍能保证较为稳定的感知效果,中近距离表现与晴天相当。当摄像头出现画面质量下降、甚至因视窗遮挡导致关键画面丢失时,此时激光雷达输出的高质量数据,将与摄像头形成相互补充,成为系统的重要安全保障。
让雨雾天行驶更安全
为什么激光雷达能行
激光雷达主动发光,视线更远
雨雾的本质是空气中弥散着小水滴,会吸收、散射光线。光线在雨雾中穿梭时被吸收、散射到不同方向,不仅让太阳光到达地面光线减少,被物体表面反射后,再经过雨雾的层层吸收,到达人眼和汽车摄像头时已极大衰减,不足以看清物体。雾天通常发生在光照条件本就更弱的清晨和夜间,对汽车感知能力的挑战尤为巨大。
在保证人眼安全的前提下,激光雷达到达 100 米附近物体的光功率密度相当于可见光的 7 倍左右3,自然能在恶劣天气情况下依然保证更高质量的探测性能。尤为可贵的是,激光雷达发射的不可见光并不会像可见光一样对人眼造成光线错乱,只是默默地守护每一段路程,带给车辆更好的安全。
大“光圈”设计,为光子敞开大门
在雨雾天,传感器面临的另一挑战是视窗被水雾附着遮挡,影响光线的透过,导致感知能力进一步恶化。
车载摄像头由于光学口径小,有时候单个雨滴就会遮掉视野中包含关键信息的大片区域。为此,汽车制造商不得不开发清洗系统解决方案,以防止摄像头镜头上产生积水和污垢。
而激光雷达采用了更大的光学口径,最大程度保证光线的进入,使得光线被视窗水滴的影响大大降低。因此即使激光雷达的测远能力有所下降,但数据依然完全不会因雨水而失真,保证了对路面车辆、行人的稳定感知。

视窗水滴附着会导致摄像头大片区域数据丢失
值得一提的是,禾赛 AT 系列产品采用的转镜方案,其光学口径远大于 MEMS 振镜方案,在面临雨雾时也会展现出更大优势。
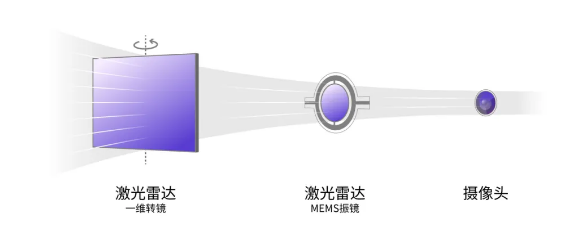
激光雷达和摄像头光学口径对比
单光子探测器,全力捕捉每一个回来的光子
当光子进入“光圈”的大门之后,还需要在感知的最后环节即探测器端被捕捉,才能成功向处理器发送数据信号,此时比拼的就是对探测器对光子的捕捉能力,禾赛面向量产智能汽车交付的激光雷达采用了先进的单光子探测器,只需几个光子就能产生有效的数据信号,全力保障汽车感知能力在各种情况下不打折扣。
禾赛面向ADAS的产品采用了单光子探测器
激光雷达测远能力越强,穿透雨雾能力越强
总而言之,既然雨雾会削弱激光雷达的测远能力,那么只有激光雷达在标准条件下的测远能力越强,在雨雾天才能依旧保证较远的探测。从这个角度来看,评价一款激光雷达穿透雨雾能力的重要标准就是 10% 反射率标准测距能力。相比于 150 米 @10% 的激光雷达,200 米 @10% 的激光雷达在雨雾天的表现能够提升 1/3,使得智驾系统的感知能力能在雨雾天发挥出最大效果,持续保障汽车的全天候全场景的行驶安全。
L3加速落地
提升全场景感知能力是趋势
2024 年,L3 拉开序幕,对汽车感知的全场景泛化能力提出了新的要求,未来的激光雷达不仅要具备更高的性能,更要具备穿透雨雾、滤除噪点各类新“技能”,帮助 L3 使用场景扩展到更广泛的天气条件。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:激光雷达微信群、新能源汽车微信群、自动驾驶微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)



微信联盟:激光雷达微信群、新能源汽车微信群、自动驾驶微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)










评论排行