
让高阶智驾触手可及-HDC2.0记忆行车的不俗表现
【ZiDongHua 之驾驶自动化收录关键词: 宏景智驾 新能源汽车 智能驾驶 毫米波雷达】
让高阶智驾触手可及-HDC2.0记忆行车的不俗表现
前言
“比起在纸上,我更愿意场地作图!”
——迪埃贝多·弗朗西斯·凯雷
01
创新范式的思考
2022 年 3 月 15 日,有建筑界“诺贝尔奖”之称的普利兹克奖授给了来自西非布基纳法索的建筑师迪埃贝多·弗朗西斯·凯雷。在此之前,有人因和谐地融合了现代主义和和历史元素而获奖,有人因在建筑作品中融入尖端科技和前卫理念而摘得桂冠,也有人因平衡了形式的巧妙和功能的强大而打动评委...但凯雷获奖的的原因却是另外一种画风。
下面这张照片展示的是凯雷的代表作之一,他故乡的一所小学。在这个项目中,凯雷就地取材,使用当地的粘土制作泥砖,这种经济的建材不仅易于生产而且可以抵抗炎热的气候,唯一的缺点是无法抵御雨水的冲刷。因此,凯雷依旧采用一种价格低廉的材料---波纹金属板,增加了一个伸出建筑主体边缘的大顶,解决了雨水侵蚀的烦恼。但这在炎热的非洲,会带来难以忍受的室内高温。于是,设计上将屋顶架高,引入一个充分通风的穿孔粘土天花板,高温的问题也迎刃而解。

凯雷还做过很多类似的项目,他认为好的设计应该从使用者自身的福祉出发,聚焦最重要的基本需求、在有限的预算内,利用或者重估已有的经验、知识和技术,创造性的交付成果,同时仍然不牺牲优雅的美感。显然,这很难让人否认这也是一种创新的范式。
创新,原来并非只有巨额研发投入砸出一个炫目的果实这一条路径,凯雷为另外一种创新范式书写了一个生动的注脚。
02
HDC2.0的前世今生
回到烈火烹油的新能源汽车市场,智能驾驶作为汽车“新四化”的主战场之一,自然吸引大量的人才和资金投入。技术进步是显而易见的,很多高端智驾的功能体验已经可以用“惊艳”来形容,作为从业人员对这一点深有体会。但另一方面,与我们直观感受有些相悖的事实是,真正享受到智驾技术进步的消费者数量仍然比较低。
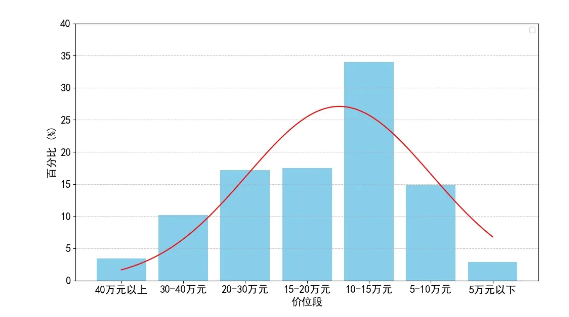
根据乘联会的统计,2023 年国内乘用车零售总量达 2169.9 万辆,但 15 万以下的车型占到了 51.7%,这个比例可以继续细分成两部分:占比 17.7%的 10 万以下车型和占比 34%的 10-15 万车型。10 万以下的车型的智驾功能渗透率几乎可以忽略不计,15 万以下的车型配备高端智驾(NOA 功能)的车型也寥寥无几。这意味着,接近五分之一消费者无法享用辅助驾驶带来的便捷,而能体验到辅助驾驶功能的消费者大部分体验的也只是基础的 L2 功能。
根据佐思汽研的测算,高端智驾 NOA 的渗透率在 2025 年可达 30%,当然这个数据包含了高速 NOA 和城市 NOA。高速 NOA 是 L2 级向更高级别跃进的最初形态,也是目前大多数车型 NOA 功能的真实形态,而更高性能的城市 NOA 功能,虽然已经在多款关注度比较高的车型上量产,但从绝对数量上来看,仍旧是极少数。要实现城市 NOA,车端需要配备丰富的传感器(典型的配置是 6 个行车摄像头,1 个激光雷达,若干个毫米波雷达)和大算力芯片(典型 AI 算力 200T 以上),一个典型的系统配置成本可以很轻松的超过 1.5 万元人民币。需要指出的是,这还仅是边际成本,如果考虑当下抢尽风头的端到端或者至少是分阶段端到端的算法的开发成本,总体成本则会更高。
天然的、高昂的成本成为阻挡这个功能触及更多用户的隐形天花板。而从消费者角度出发,城市场景又占据了用车的绝大部分时间。这一点可以从更符合中国乘用车使用实际情况的 CLTC 测试循环的工况设置看出来,根据循环的速度曲线不难统计出高速工况仅占总时长的 10.7%,而城市工况和郊区工况各占了 52.8%和 36.5%。
一边是巨大的需求,一边是高企的成本,如何在这二者之间取得平衡?建筑师凯雷的故事带给我们很大的启发,我们不禁自问,如何用更容易负担的起的成本去解决用户大部分的城市出行场景?对这个问题的思考,促成了宏景智驾产品路线图上 HDC2.0 序列的诞生。
03
揭开HDC2.0的神秘面纱
当我们分析用户城市用车场景的时候,一个直观的感受是固定路线的通勤占据了我们城市用车时间大部分比例。如果能在这个高频场景下以相对经济的方式提供体验优异的驾驶辅助功能,将会为用户带来巨大的价值。
为了降低系统的价格门槛,需要对传感器配置和计算资源进行精打细算,为此我们在技术路线上对这种高频的固定路径采用了“记忆“的方式,所谓”记忆“就是通过视觉提取环境中的特征,并将这些特征和车辆自身的运动学信息关联起来,并将相关的数据存储下来,这样就相当于帮助车辆建立并记忆了一个路线图。在成功记忆一条路线后,再次行驶这条路线时,车辆就可以根据相机实时感知的结果实现定位,知道自己处在这条路线上的哪个位置。采用这种方式,可以省掉成本高昂和”鲜度“堪忧的高精地图。
对于成功“记忆”的路线,我们将需要处理的典型挑战场景分成路段和路口两大类。在路段上,典型的挑战场景主要有:静止或低速车辆的避障绕行,相邻车道车辆的博弈交互(自车变道,临车 cut-in 等);路口场景的典型挑战场景包括:红绿灯状态识别和路面标志的关联,密集车流下的转弯,行人和非机动车避让,鬼探头场景的处理等。
为了以相对经济的方案应对这些挑战,在感知器件上,我们取消了昂贵的激光雷达的同时,保留了毫米波雷达,同时保持了相机部署的灵活性,除了前视相机之外,还可以复用高速 NOA 功能的周视相机。在算力方面我们希望能控制在几十 T 的水平。无疑,这对算法能力提出了很高的要求,需要聚焦关键功能和场景,进行软硬一体的深度优化。历时近一年的高强度工作,宏景智驾前瞻团队的同学交出了自己的成绩单,让我们一起看下 HDC2.0 记忆行车的不俗表现。
04
创新,步履不停
在宏景,创新从未止步。凯雷用他的作品告诉我们,创新不仅仅是技术的突破,更是对人的福祉的深刻理解和回应。正如他在设计中以有限的资源实现了卓越的效果,HDC2.0 亦是如此。对技术的精细优化和对用户需求的深刻洞察,让我们将“科技平权”的美好愿景变为现实,让更多的人在日常通勤中享受科技带来的便捷与安全。创新,正是我们永不停歇的脚步和无尽的追求。
我要收藏
点个赞吧
平台转发数:1次

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:新能源汽车微信群、智能驾驶微信群、毫米波雷达微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:新能源汽车微信群、智能驾驶微信群、毫米波雷达微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语







担任班主任|哈尔滨工业大学2025年将新增全国首个自主智能系统院士特色班")





评论排行