
基于场景的自动驾驶算法测试验证方法研究
基于场景的自动驾驶算法测试验证方法研究
✧
基于场景的自动驾驶算法测试验证方法研究
✦
背景
由于自动驾驶技术的复杂性,传统基于规则和基于里程的测试验证方式已经不再是最优解,而是需要基于场景来做更全面的测试验证。针对此问题,国内外持续推进智能网联汽车准入管理和基于场景测试验证的相关研究。
联合国世界车辆法规协调论坛(WP.29)自动驾驶验证方法非正式工作组提出包含场景目录、模拟仿真测试、封闭场地测试、实际道路测试、审核评估和在用监测等5类技术手段的《自动驾驶新型测评方法(NATM)》[1]。2022年8月,欧盟发布自动驾驶车辆型式认证法规REGULATION (EU)2022/1426[2],提出必须对自动驾驶系统(ADS)进行合规性评估,评估内容基于最关键、最相关和最小范围的交通场景开展,型式批准机构或代表其行事的技术服务机构则通过针对性的抽查和测试进行审核。国际标准化组织ISO开展ISO 3450X系列自动驾驶测试场景相关标准的研究。其中,在已发布的ISO 34501[3]中,明确定义了功能场景-(抽象场景)-逻辑场景-具体场景的关系,如下图1所示。
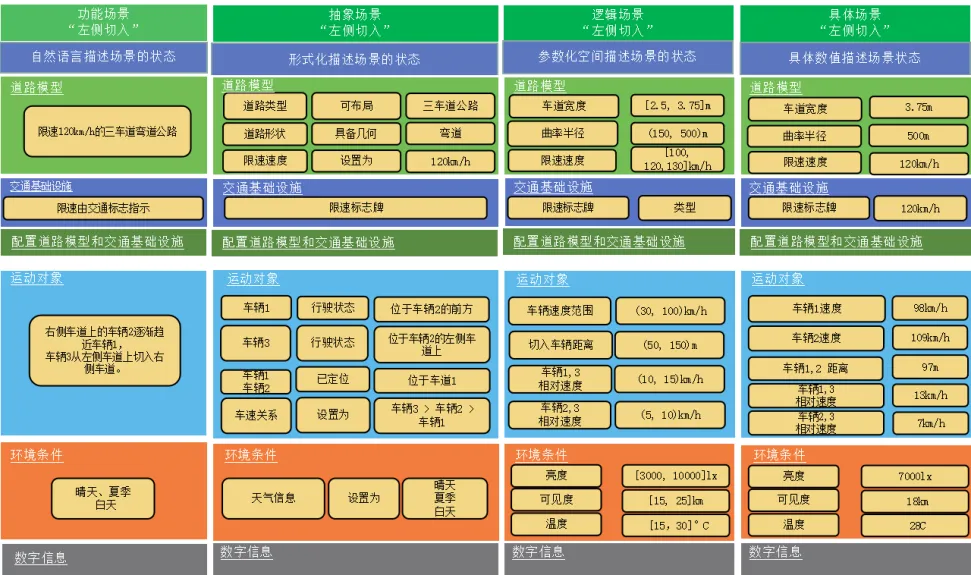
图1 功能场景-抽象场景-逻辑场景-具体场景关系示意图[4]
2023年底,四部委发布的《关于开展智能网联汽车准入和上路通行试点的通知》[5] 中明确,模拟仿真应至少开展充分、合理的标称场景、危险场景和边缘场景测试,封闭场地应开展典型场景测试,实际道路应开展连续场景测试。全国汽车标准化技术委员会编制的“三支柱”推荐性国家标准[6] [7] [8]中规定了功能场景、逻辑场景和具体场景等层面的具体要求。
本篇文章主要研究和阐述赛目科技提出的一种基于场景的自动驾驶算法测试验证方法,从逻辑场景角度对场景开展确定类测试验证和估计场景的失效概率,最终对自动驾驶算法开展全面的验证。
方法论的前提是构建“场景空间”。基于“功能场景-逻辑场景-具体场景”框架,在 “功能场景”基础上,已知可以通过M个场景参数和参数的分布区间构建1个“逻辑场景”,随着M个场景参数具体取值的不同,每个“逻辑场景”又包含N个“具体测试场景”。假设每个场景参数都等效于一维空间,那么1个具备M个场景参数的“逻辑场景”则可等效于1个M维、连续的 “场景空间”。假设一个M维、连续的逻辑 “场景空间”用来表示,该逻辑场景下的一个具体场景可以表示为此空间中的一个点。“场景空间”示意图如下图2所示。
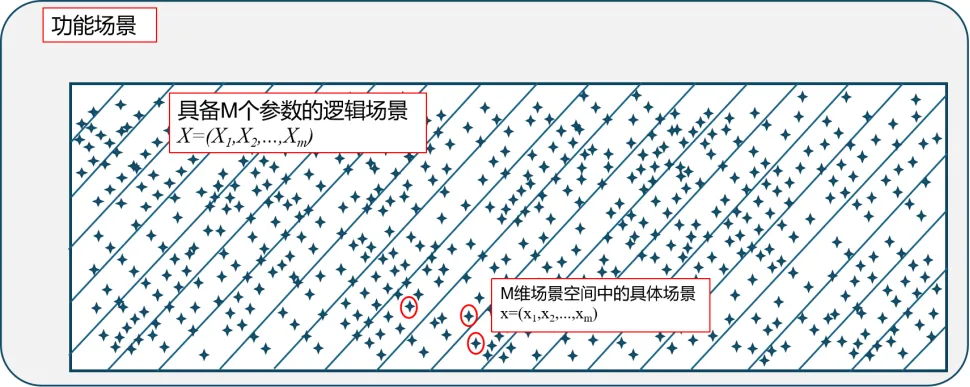
图2 场景空间示意图
方法论
确定类场景示意图如下图3所示。
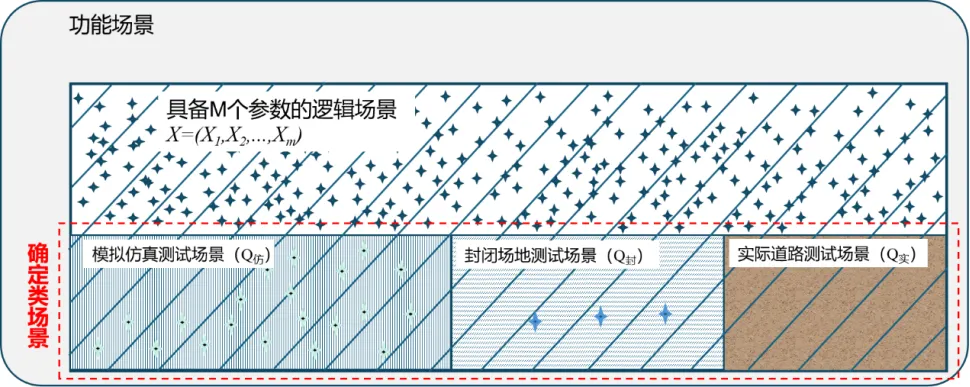
图3 确定类场景示意图

我要收藏
点个赞吧
平台转发数:2次

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:自动驾驶微信群、智能汽车微信群、智慧交通微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:自动驾驶微信群、智能汽车微信群、智慧交通微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语




隐形冠军论坛“‘智驭未来,绿动出行’智能网联新能源汽车产业专题活动”举办")







评论排行