
新增无图城市领航 成行智驾可解释端到端智驾算法即将量产
【ZiDongHua之驾驶自动化收录关键词:智能驾驶 智驾算法 红旗 卓驭】
新增无图城市领航成行智驾可解释端到端智驾算法即将量产
2024年11月,通过深度优化算法、软件、模型及进一步数据积累,卓驭的高阶智驾算法架构成行智驾再迎进化:由今年9月已量产的两段式端到端算法,升级为可解释端到端算法。成行智驾可解释端到端算法全面提升了各项智能驾驶能力的体验上限,新增全国都可开的无图城市领航高阶智驾功能,并可兼容「成行平台」的7V高算力方案和10V高算力方案。
作为「成行平台」最新的高阶智驾算法架构成果,成行智驾可解释端到端算法将在红旗与卓驭合作的首款车型全新高端智能纯电SUV天工08上首发搭载。
01
新增无图城市领航能力全场景丝滑拟人
成行智驾可解释端到端算法基于高通Snapdragon Ride™SoC(SA8650P)打造,算力达到100TOPS,满足可部署当下最先进算法的条件。
卓驭运用擅长在极致算力压榨下高效部署模型的能力,让成行智驾的算法架构进行可解释端到端模型的部署,即最终通过一个模型打通感知、预测、决策和规划多个模块,让智能驾驶系统信息传递损失更少,性能体验上限更高。与此同时,在端到端模型内保留感知、预测、决策模块中间的可解释输出,以提供丰富的语义交互信息,让用户在智驾的体验过程中理解更直观、使用更安心。

10V高算力方案的成行智驾可解释端到端算法示例
通过搭载成行智驾可解释端到端算法,能够从感知端的多源信息融合输入直出驾驶轨迹,卓驭高阶智能驾驶系统新增无图城市领航功能,可实现路口左右转、避障绕行、领航变道、AI调速等城市领航中常见的全场景功能。与此同时,成行智驾可解释端到端算法对于各项智驾能力在体验上限上也有显著提升:
▪行车场景:复杂路口通行的道路左右转和针对任意障碍物的绕行避让成功率均大于99%。结合视觉感知+导航地图+「AD Map」前融合端到端导航路径规划的能力,实现全国城市100%覆盖,真正做到全国都可开;
▪泊车场景:实现真正全场景的智能泊车:记忆泊车无论室内室外、白天黑夜均可用,并支持停车场收费杆自动识别通行和反向定位巡航等能力,优化狭窄车位泊入(支持最窄垂直车位车身+40cm宽度/支持最短水平车位车身+80cm长度),30秒内高效泊入让泊车效率上获得进一步提升。
成行智驾即将升级的端到端模型,基于独特的双目视觉增强技术,以及数百万段高质量驾驶数据,实现了全场景的数据驱动智驾体验,在行泊体验上更加丝滑拟人。以下是成行智驾平台车的可解释端到端城市领航道路实测表现,先睹为快:
成行智驾可解释端到端算法还引入安全推理框架机制,即根据实际需求和场景集,构建智能驾驶行为“黑名单”,对驾驶轨迹进行合理筛选,删除有风险的驾驶轨迹,从而保障自车行为在智驾状态下的可控性,提供安全、轻松的智驾出行体验。
成行智驾可解释端到端算法输出安全且拟人的驾驶轨迹
02
兼容不同视觉构型全向增强双目OCC检测更鲁棒
作为高阶智驾算法架构,成行智驾的可解释端到端算法对硬件配置有一定的灵活性,即可兼容「成行平台」的7V高算力方案和10V高算力方案。
成行智驾可解释端到端算法的首发车型一汽红旗天工08,在硬件上搭配10V高算力方案。相比于卓驭已在多个品牌合作车型上量产的7V视觉构型,10V视觉构型则将前视惯导双目升级为前视惯导三目,新增一颗800万像素长焦单目摄像头,将前向感知距离提升一倍,同时车身两侧各增加一颗侧视单目摄像头,将侧视感知距离提升40%,可进一步提升大路口超远距离红绿灯识别、无保护路口高速横穿车辆应对等复杂场景的安全体验。成行智驾可解释端到端算法搭配7V高算力方案的量产车型,预计在2025年初上市发布,在高阶智能驾驶功能上将同样具备全国都可开的无图城市领航和全场景智能泊车能力。
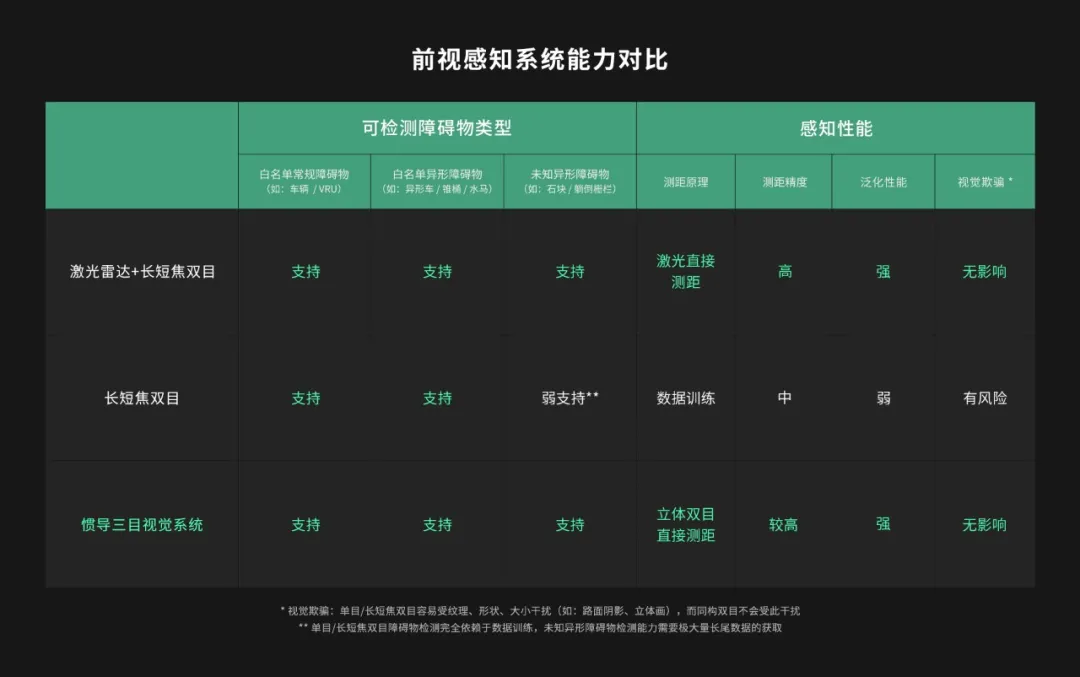
无论是7V视觉构型还是10V视觉构型,均配备惯导立体双目视觉系统,这套卓驭独有的创新技术设计,在感知能力上会带来领先的智能驾驶安全体验:
▪基于仿生立体双目视觉原理,惯导立体双目视觉系统设计800万高分辨率双目摄像头,通过视差获得空间三维信息,相比于容易受纹理、形状、大小(如:路面阴影、立体画)视觉欺骗的长短焦双目视觉,仿生立体双目视觉不仅不受此干扰,还具有强泛化性,对未见过的场景也能鲁棒检测,让边角场景泛化性能有保证;

▪通过卓驭独创的立体双目增强OCC(Occupancy Network即占用网络)技术将障碍物感知精度提升至0.05~0.1米的范围,不仅支持异形车、雪糕筒、水马、石块等任意类型障碍物检测和避让,实现更强驾驶安全性;并且通过AI模型和双目点云双冗余感知技术,使其性能上限更高,障碍物检测更鲁棒。高度集成仿生立体双目+长焦单目的惯导三目视觉系统,更将OCC障碍物检测距离提升至150m,红绿灯识别距离提升至200m以上,远距离感知响应更及时。
高分辨率全向双目增强OCC感知效果泊车场景
高分辨率全向双目增强OCC感知效果行车场景
从今年9月首发树立高阶智驾新范式的中算力两段式端到端,到即将上车量产的成行智驾可解释端到端算法,在端到端技术的前沿探索和工程落地上,卓驭始终保持着积极而谨慎的务实姿态,让车企轻松标配高阶智能驾驶系统,让消费者使用智能驾驶功能更加安全可靠,让“为所有人,提供安全、轻松出行体验”的使命成为现实。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:智驾算法微信群、红旗微信群、卓驭微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:智驾算法微信群、红旗微信群、卓驭微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语








评论排行