
安森美工程师贾鹏:用NCV7685加速汽车后尾灯设计
【“TWINHOW 推好”解决方案:动态尾灯系统、 LED解决方案】由于 LED 方案带来的成本和控制优势,广泛用于汽车售前市场和售后维护。在未来的 V2X(车联万物)世界中,我们可预见无人驾驶车辆通过传感器或灯光不断与外界通信,从而提高道路安全性和行驶畅通性。届时,将会有更精密的 LED 像素,由数百颗受控 LED 来传递信息。
用NCV7685加速汽车后尾灯设计
作者:安森美方案中心应用市场工程师贾鹏
汽车照明行业正处于演变中;LED(发光二极管)在高端车型中比传统灯泡(卤素灯和氙气灯/HID)更受欢迎,因为它在功耗、使用寿命、光强度和尺寸方面具有优势。LED 或 LED 灯串的紧凑尺寸为汽车照明设计带来了灵活性和想象力,如矩阵大灯和动态尾灯。

图 1. 车辆照明演变
一个智能矩阵大灯通常含 30 多颗 LED ,由智能控制系统控制,可根据路况自适应地改变 LED 的工作。顺序转向信号灯是最初的动态尾灯类型,于1965 年首次用在福特雷鸟(Ford Thunderbirds)中,现由于 LED 方案带来的成本和控制优势,广泛用于汽车售前市场和售后维护。在未来的 V2X(车联万物)世界中,我们可预见无人驾驶车辆通过传感器或灯光不断与外界通信,从而提高道路安全性和行驶畅通性。届时,将会有更精密的 LED 像素,由数百颗受控 LED 来传递信息。
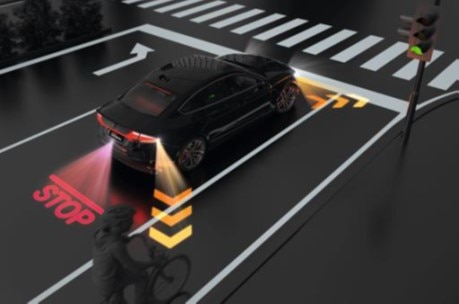
图 2. 车辆通过车灯进行通信(来源: Kurtulus, OU (2021)。汽车尾灯的新趋势和功能。EPSTEM)
动态尾灯系统需要更精密的 LED 控制和快速信号通信。NCV7685 是实现多 LED 驱动条件的最佳选择。它是一款 12 通道 60 mA LED 线性电流驱动器,可通过 I2C 控制,支持128 个不同的可调占空比水平,通过 I2C 串行接口对每个可编程输出通道独立使用脉宽调制 (PWM) 调节。
STR-NCV7685-REAR-GEVK是一款Strata赋能的汽车尾灯应用评估板,可通过蓝牙低功耗(BLE) 进行远程通信,采用线性 LED 电流驱动器 NCV7685 和业界最低功耗的蓝牙® 5 系统单芯片(SoC) RSL10 SiP ,安装了 6 颗 NCV7685 芯片来驱动总共 72 个 LED 节点,以实现具有可配置参数和自定义模式的预定义动画——所有设置和电路监控均可通过 Strata 访问。
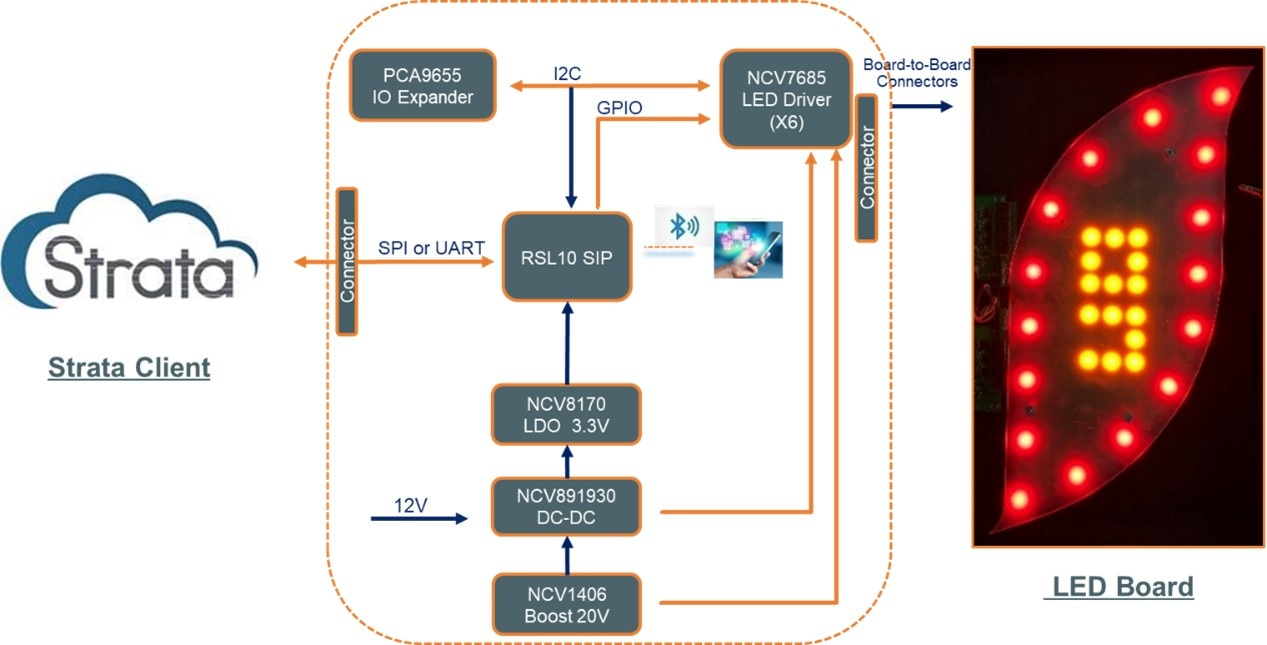
图 3. STR-NCV7685-REAR-GEVK 框图
通常,在多 LED 驱动器应用中,固定寻址是首选,以完成复杂的动画和多 LED 控制。但需要更注意确保芯片和地址的匹配,以进行大规模生产或售后维护。在STR-NCV7685-REAR-GEVK的固件中,采用了浮动寻址。每次通电时,每个 NCV7685 都会被临时分配一个地址,但不会锁定在一次性密码 (OTP) 寄存器中——如果资源有限,可以使用 MCU 的 GPIO 或 IO 扩展器(STR-NCV7685-REAR-GEVK中的 RSL10 和 PAC9655E)来实现。在Strata Developer StudioTM中,可访问固件代码和所有文档,包括用户手册和制造文件,从而显著加快设计工作。
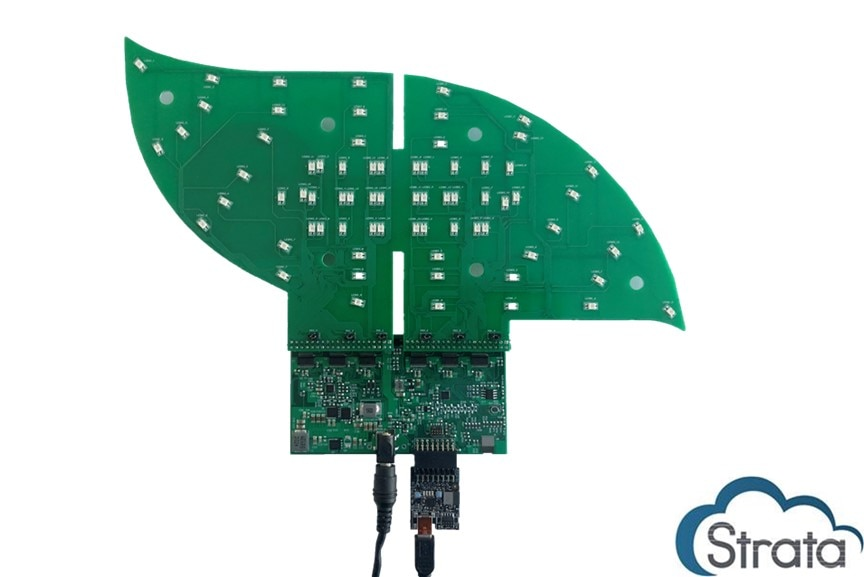
图 4. Strata赋能的尾灯评估套件 STR-NCV7685-REAR-GEVK
要开始使用,需下载并安装 Strata Developer Studio。然后将套件随附的 mini-USB 电缆从电路板插入运行 Strata 的 PC。连接后,电路板会被自动检测到,点击“打开平台控件(Open Platform Controls)”按钮就可立即访问控制用户界面 (UI)。控制 UI 中的导航选项卡一目了然,提供全面的评估体验。
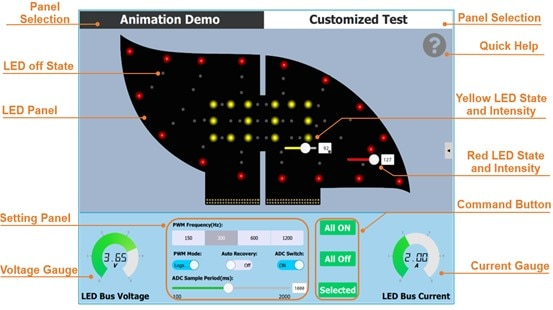
图 5.“定制测试”选项卡中的单个 LED 调光设置
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:贾鹏微信群、NCV7685微信群、V2X微信群、汽车尾灯微信群、动态尾灯系统微信群、解决方案微信群、DAN微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:贾鹏微信群、NCV7685微信群、V2X微信群、汽车尾灯微信群、动态尾灯系统微信群、解决方案微信群、DAN微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语







评论排行