
“煤黑子”变成“煤亮子”,机器人描绘智能矿山发展大格局
【ZiDongHua 之方案应用场收录关键词:雷克智能 机器人 智能矿山 机器视觉 】
“煤黑子”变成“煤亮子”,机器人描绘智能矿山发展大格局
路遥在《平凡的世界》中描写了这样一个地方:阴暗潮湿的地下数百米仿佛与世隔绝,瓦斯爆炸、巷道冒顶等危险因素如影随形,这就是孙少平工作的大牙湾煤矿。在机器自动化造福千行百业的今天,煤矿减人战略依旧举步维艰,即使用自动掘进机代替镐头,却依然有工人几个月见不到日光。
地面上,5G基站星罗棋布,专家期望将5G信号应用到地下,解决4G网络下煤矿工业环网宽带不足、复杂信息传输延时不可控、井下状况感知不透明的行业痛点,由此衍生出“5G煤矿”的概念。
“5G煤矿”是数字化在煤矿场景的深度渗透。在5G通信的覆盖下,井下通风自动化系统、选煤自动化系统和安全监测系统等一系列自动化系统的运作数据,被悉数传输至井上操控平台。以掘进工作面智能设备为代表的煤矿终端的数字化程度越来越高,它们所产生的数据量是4G网络难以承托的。然而,由于井下防爆要求严,信号基站建设成本高, 5G煤矿大规模落地应用尚待时日。在这样青黄不接的技术截断期,山西综电科技有限公司(以下简称“山西综电”)基于Wi-Fi无线通信系统的煤矿井下通信解决方案,研发更智能的井下机器人设备,在煤矿智能化的蓝图上增添可圈可点的一笔。
立足煤炭大省,山西综电放眼煤炭行业广泛存在的现代化、智能化应用需求,研发智能化高、质量过关的煤矿井下机器人产品,打造出四摆臂救援机器人和轮式搬运机器人,在真实场景中发挥重要作用。
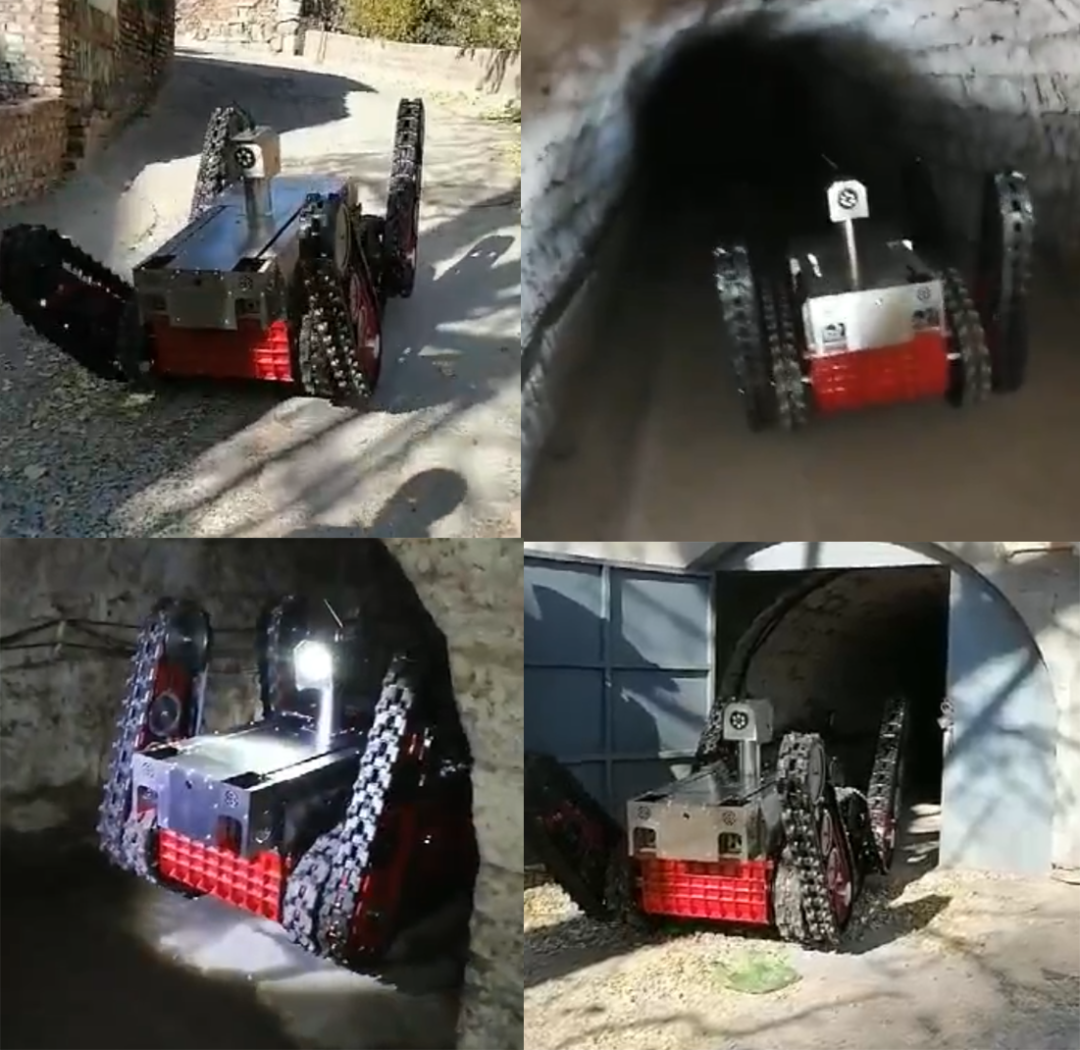
图1 山西综电四摆臂救援机器人
四摆臂救援机器人
在应急救援场景小试牛刀
国家矿山安全监察局针对煤矿机器人20种不同的应用场景,将煤矿机器人分为掘进类、采煤类、运输类、安控类,以及救援类五大类。其中,煤矿救援机器人是不可或缺的一部分。
近年来,蛇形机器人越来越多地出现在应急救援现场。应用在煤矿环境中,蛇形机器人在布满障碍的废墟中占据多地形运动的优势,但也有环境感知的弊端。蛇形机器人往往会在辨识度低的环境中丧失方位感,而轮式和履带式机器人的摄像头视野更符合人眼视物习惯,方便操控者掌握环境特征和机器人位置。相比仅有两条履带的机器人,四摆臂的设计也为机器人越障性能增幅良多。

图2 团队测试四摆臂救援机器人的越障性能
煤矿井下的危险是众所周知的。根据形成原因的不同,煤矿井下易发生的灾害主要有五种:瓦斯突出、煤尘突出、矿井火灾、矿井水灾和顶板事故。“在机器人设计之初,我们就充分考虑到了每种灾害的应对方案。煤矿五大灾害救援无人化巡视系统提高了对这五大灾害的防治能力,并提高了煤矿安全监督水平和灾害救援的效率。”山西综电董事长冷永红着重强调了救援型机器人对煤矿安全、稳定、高效运行的重大意义。
CD4气体和温湿度探测设备在煤矿井下广泛应用,可用来防治瓦斯突出、煤尘突出等灾害。煤尘和瓦斯突出是指采掘过程中大量破碎煤块和瓦斯气体在地应力作用下突然喷射而出的地质灾害。在这种灾害发生前,一般会出现瓦斯气体浓度异常、温度忽高忽低的预兆。通过测定甲烷、一氧化碳、二氧化碳、氧气这四种气体的浓度和温度(-20℃~80℃),以及湿度(0.1%~98%),机器人检测这些环境指标达到警戒线后,将通过扬声器放出示警音并把消息同步给总控中心,从而有效地帮助防治煤尘和瓦斯突出。此外,矿井水灾是指采矿过程中地表水或地下水涌入矿井和采区(通常称“透水”),征兆主要体现在煤壁挂汗、顶板淋水增大、底板鼓起渗水,以及气温降低,同样能通过上述环境指数的灵敏识别来防治。

图3 四摆臂救援机器人在阳煤救援大队
应对矿井火灾和顶板事故,需要用到机器人搭载的视觉识别模块。发现火焰后,将标注位置,向总控中心发送火焰大小、位置,结合机器人采集到的环境气体数据和周围图像信息,总控中心工作人员可以初步判定事故缘由,如煤和硫化矿石自燃,并判断周边有无使火势扩大的潜在危险因素,命令机器人采取力所能及的灭火操作。同理,机器人在巷道行驶途中使用摄像头收集顶板图像,通过智能识别裂缝宽度来评估发生顶板事故的风险。此外,机器识别模块的对象还包括警示牌和人形等。机器人识别到警示牌后,通过和学习库对比,“读出”该警示牌的含义,按照要求执行操作;发现人形后,将采取躲避动作,避免对人员造成伤害,保障人机交互的安全可靠。山西综电自建机器学习数据库,随着应用规模扩大和时间延申,定期更新,助力机器人视觉模块识别准确率和智能化水平得到进一步提升。
“小黄车”跑遍地下矿网
这个设想正行于路上
“我曾听到一种‘急平结合’的理念,这个理念能很好地指导未来一段时间内煤矿机器人的发展方向。”据冷永红介绍,所谓“急”,是面向发生煤矿事故后的应急救援场景,“平”是面向煤矿平时生产场景中的环境检测、物品运输等日常功能。“急平结合”是指煤矿不仅要发展救援机器人这样工作在特殊场景中的机器人,同时也要研发辅助生产的通用性机器人。在四摆臂机器人顺利投入应用后,冷永红研发团队开始思考一种通用的轮式煤矿井下机器人,经过权衡,他们将目光转向搬运类机器人。
经过两年的深耕探索,轮式搬运机器人终于研发成功。摆臂的成本和制造难度都非常高,在应对常规场景下坑坑洼洼的障碍时,轮式AGV也能够做到游刃有余。不同于四摆臂机器人将摄像头架设在上部的设计,它的上部呈平台状,前后各带两盏矿灯,目前正在申请煤矿安全认证。由于通体刷成亮黄色,冷永红研发团队亲切地叫它“小黄车”。“之所以给它的上部做成小平台的设计,是为了适配将来更多应用,比如焊接一个物料斗,就能让它搬运工具和物品,再比如装载带钻孔末端的机械手,小黄车就有了操作手。”冷永红举例道,“当然,机械手这类二次搭载的模块也需要经过煤安认证。为确保生产安全,煤矿井下的矿灯都需要办理认证手续才能上岗,我们把小黄车送去煤安认证,也是为了它将来能得到更广泛的应用和认可。”
与四摆臂救援机器人类似,“小黄车”上搭载了气体探测模块和机器视觉模块,具备基础的智能性。每台“小黄车”上还配有一台矿用平板电脑,其中集成了多项命令,如“从一号巷道出发,装载工具,运送到二号巷道”,工人忙碌时也可以通过语音输入指令。“小黄车”又像一部可以移动的无线卫星通信电话,工作人员通过它即可联络到井上总控中心。
通用化的平台设计,让“小黄车”能在井下拥有多重功用,在煤矿安全认证的加持下,煤矿机器人的应用之路必将越走越宽。假如多台通用化小车在各巷道之间穿梭,在井下自组了一张交通网,将煤矿变为“物流中转中心”,“这是机器人量大之后带来的一种群体效应,”冷永红畅想道,“就像蚂蚁一样交头接耳,我传给你,你传给他,甚至都不需要5G网络就可以互相传递信息。”
实现煤矿无人控制常态化
还有很长的路要走
“安全第一”是所有煤矿人的共识。客观来讲,煤矿管理者无法信任智能设备的安全性,是煤矿机器人市场破冰的阻碍因素之一。“我们从研发、生产、认证、应用这一系列流程来看,要考虑更多安全性的问题,生产制造设备的难度和成本就会有所提高。难度提高,就面临着认证过程难度增大。到防爆中心做防爆检测,到煤安中心做煤安认证,还面临生产管理能力等各方面的综合性考量,这又会带来研发和生产的成本提高。”冷永红叹惋道,“真正落地应用的煤矿机器人类型相当少,这也是不得已的状况。”
煤矿机器人与家用等其他场景的机器人相比,环境条件更严苛,技术领域更专精,投产流程更漫长。以煤矿机器人生产研发商的视野来看待行业时,冷永红期待一座煤矿机器人创新基地的建成,各类型机器人可以在真实的矿下运作起来。如果说煤安认证是煤矿机器人通往落地的“大考”,胜败在此一举,创新基地相当于给各类型机器人“模拟考试”的机会。在实景考验中及时锻长补短,而不是闭门研发、盲人摸象,仅凭认证结果被告知技术缺陷所在,如此,才能真正给煤矿机器人技术创新“提提速”。
煤矿安全生产路在何方?路在煤矿智能化。距离实现从煤矿到洗煤厂的“不落地生产”还有很长的距离,煤矿机器人正在努力蜕变,从智能救援和煤矿减人两个着力点出发,以更安全、更可靠、更智能的“矿蚁”角色,助推实现煤矿零死亡的目标,默默守护万户煤矿家庭的平安。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:机器人微信群、智能矿山微信群、机器视觉微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:机器人微信群、智能矿山微信群、机器视觉微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语












评论排行