
机器人学国家重点实验室微纳米自动化课题组在磁热联合驱动的微型软体机器人研究中取得新进展
中科院沈阳自动化所磁热联合驱动微型软体机器人研究取得进展
原题:沈阳自动化所磁热联合驱动微型软体机器人研究取得进展
近日,中国科学院沈阳自动化研究所机器人学国家重点实验室微纳米自动化课题组在磁热联合驱动的微型软体机器人研究中取得新进展。科研人员利用4D打印技术制备的软体机器人在近红外光和磁场的联合驱动下,展示了弯曲形变、夹取及搬运功能,在微结构搬运、药物控释等方面展现出重要的应用前景。相关研究成果发表在CompositesPartB-Engineering上。
软材料利用内部能量变化和外部能量供应来产生形状变形和运动,对软体机器人技术的发展至关重要。4D打印是制造复杂可变形软体结构的方法之一。4D打印是直接将设计内置到打印材料中,打印加工出可自动变形的结构。然而,由于材料的物理化学性质限制,鲜有关于4D打印技术打印水凝胶材料制造软体机器人的研究。
科研人员合成了一种由温敏水凝胶(NIPAM)、纳米粘土(Laponite)和磁性颗粒(NdFeB)组成的新型磁性温敏智能水凝胶。水凝胶具有可调节的生物物理特性和变形能力,以及极佳的生物相容性。研究人员从自然界中的生物获得灵感,在外部磁场中运用多材料4D打印技术加工了仿水母和仿扇贝等软体机器人。仿水母机器人可以在外部磁场驱动下以平移、旋转、翻滚形式运动,翻过人胃模型中的褶皱,完成微结构的主动夹取和搬运。在外部磁场和近红外光产生的热场的协同作用下,机器人可以作为药物的载体并减少药物运输过程中的药物泄漏。4D打印毫米级软体机器人将推动机器人在生物工程和医疗领域的应用。
该课题组专注于小尺寸机器人研究,从毫米级、微米级到纳米级机器人开展了系列研究,在磁驱动毫米机器人、光驱动毫米机器人、热驱动毫米机器人、气泡微米机器人、细胞微米机器人、混合驱动纳米机器人等方面取得了研究成果【相关成果发表在Small(2019)、AdvancedIntelligentSystems(2021)、ACS Applied Materials& Interfaces(2019/2020/2021)、Chemical Engineering Journal(2021)、IEEE Robotics and Automation Letters(2021)、Lab na Chip(2016)】。
研究工作得到国家重点研发计划、国家自然科学基金、中科院青年创新促进会、中科院“创新交叉团队”项目、机器人学国家重点实验室的支持。

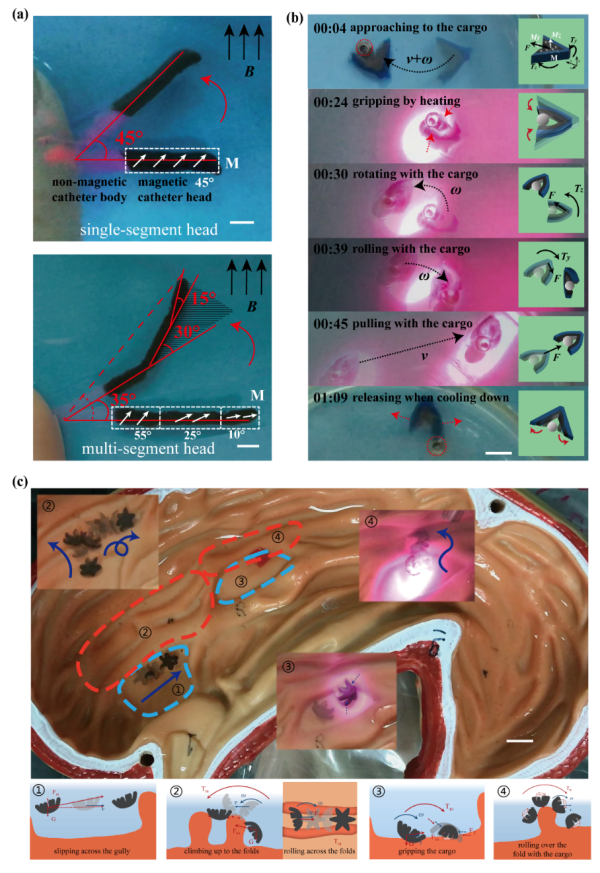
仿水母机器人在胃模型中的运动与夹持搬运

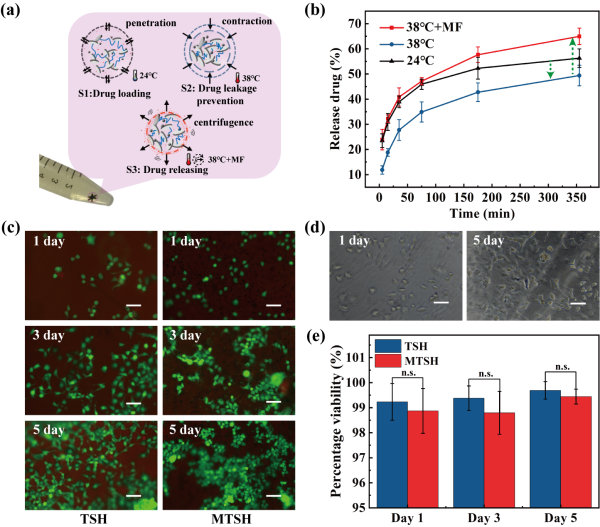
微型软体机器人可作为药物载体且具有极佳的生物相容性
动感机器人学国家重点实验室:在国内相关领域处于核心和带头地位

机器人学国家重点实验室(State Key Laboratory of Robotics)依托于中国科学院沈阳自动化研究所,前身是中国科学院机器人学开放实验室。该实验室是我国机器人学领域最早建立的部门重点实验室,我国机器人学领域著名科学家蒋新松院士1989-1997年曾任实验室主任。近二十年来,实验室在机器人学基础理论与方法研究方面与国际先进水平同步发展,并在机器人技术前沿探索和示范应用等方面取得一批有重要影响的科研成果,充分显示出实验室具有解决国家重大科技问题的能力。目前,该实验室机器人学研究总体水平在国内相关领域处于核心和带头地位,是国内外具有重要影响的机器人学研究基地。
机器人学国家重点实验室定位于为我国经济和社会发展、国家安全和重大科学工程提供所需要的机器人技术与系统,研究机器人学基础理论与方法、发展可行技术和平台样机系统,培养和汇聚从事机器人学研究的高水平人才,推动我国先进机器人技术与系统的可持续发展。主要面向发展具有感知、思维和动作能力的先进机器人系统,研究机器人学基础理论方法、关键技术、机器人系统集成技术和机器人应用技术。
实验室坚持对外开放,吸引国内外专家学者开展交流与合作研究。通过设立基金课题,实验室与国内有关从事机器人学研究的近30所大学、研究所和企业建立了联系,几乎涵盖国内从事机器人学研究的所有单位。近几年来,实验室结合自身的发展方向,有针对性地与国内外知名科研团队建立合作关系。这些合作,对于本实验室加强学科建设、了解国家需求、建立有针对性的演示验证系统,发挥了重要作用。
机器人学国家重点实验室学术委员会成员


微信"扫一扫",分享转发
微信联盟:中科院沈阳自动化所微信群、机器人学微信群、国家重点实验室微信群、微纳米自动化微信群、微型软体机器人微信群、机器人学国家重点实验室微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语












评论排行