【第一对焦:ERTRAC】The European Road Transport Research Advisory Council (ERTRAC) is the European Technology Platform (ETP) for Road Transport. ERTRAC is recognized and supported by the European Commission1.
The tasks of ERTRAC are to:
Provide a strategic vision for road transport research and innovation in Europe.
Define strategies and roadmaps to achieve this vision through the definition and update of a Strategic Research Agenda (SRA) and implementation research roadmaps.
Stimulate effective public and private investment in road transport research and innovation.
Contribute to improving coordination between the European, national, regional public and private R&D activities on road transport.
Enhance the networking and clustering of Europe's research and innovation capacities.
Promote European commitment to Research and technological development, ensuring that Europe remains an attractive region for researchers, and enhancing the global competitiveness of the transport industries.
Support the implementation of Horizon Europe, the European work Programme for Research and Innovation
ERTRAC is supported by FUTURE HORIZON, a coordinated action financed by the European Commission.
欧洲ERTRAC《网联、协作和自动化出行路线图(征求意见稿)》(上)
路线图概述
自2015年发布Automated Driving Roadmap以来,欧盟道路交通研究咨询委员会(European Road Transport Research Advisory Council, ERTRAC)持续对自动驾驶路线图进行修正与更新。2021年9月,在2019版Connected Automated Driving Roadmap基础上,ERTRAC更新发布《网联、协作和自动化出行路线图(征求意见稿)》(Connected, Cooperative and Automated Mobility Roadmap, DRAFT for public consultation)。
ERTRAC 路线图的主要目标为就欧洲网联、协作和自动化出行的长期发展提供利益相关者的联合观点。新版路线图提出面向2050年的长期愿景,明确为实现这一长期愿景需要采取必要的短期行动——2030规划和 2040展望。
一、2050愿景
在2050愿景中,自动驾驶将发展为普适性的交通方式,能为用户的交通出行提供便利低价的服务,车辆都将与道路网络及交通管理系统互联并且可以远程操控,所有新注册车辆都将实现不同级别的自动化,最终达成安全、环保的交通目标。
同时,愿景也将面临基础设施、测试验证、AI和数据等方面的挑战。基础设施方面,基础设施支撑的网联协同自动驾驶(ISAD)将必须通过实时数字孪生系统扩展自动驾驶车辆ODD,这一交通系统的功能安全性必须从整体进行评估,需要全新的标准、规范、实践、监管框架和商业模式。测试验证方面,由于交通系统不断发展的动态特性,提取测试用例的场景数据库需要不断更新,以反映ODD扩展,并应对越来越多的高级别自动驾驶车辆及新型交通工具的出现。AI和数据方面,在CCAM中实现用于态势感知的人工智能会带来各种各样的挑战,包括产业化、基于需求的开发、以及针对安全关键领域应用的训练模块的持续改进。
二、2030规划
2030规划是路线图的核心内容,包括CCAM产品和服务的四大不同领域:高速公路和走廊、限制区域、城区混合交通和乡村道路。每一领域按照概述、动机、社会效益和示范、用例、促成因素、标准化和法规的结构分别展开。

1、高速公路和走廊
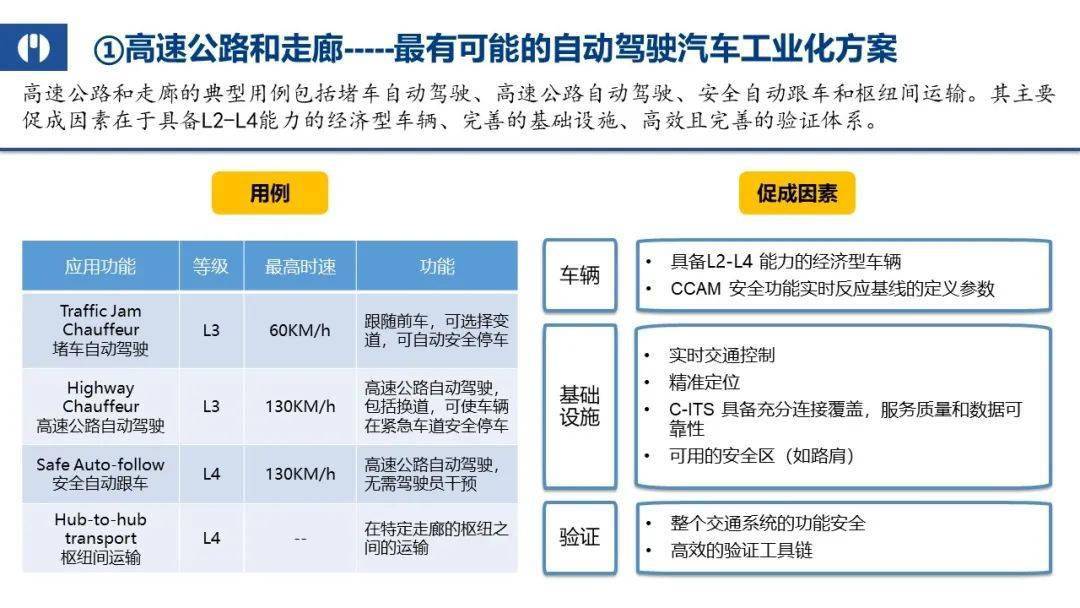
高速公路和走廊是该路线图中认为最有可能实现的没有人类驾驶员责任的无人驾驶产业化解决方案。高速公路和辅助走廊领域将实现高速公路自动驾驶、仓到仓卡车运营以及基础设施支持的协作行车辅助等典型应用。
该领域的发展动机在于,将通过自动距离跟车、机动和速度管理增强道路安全,改善高速公路和辅助走廊的交通流量,减少驾驶员工作量并增加便利性,在可行的情况下尽早引入L3‑L4级自动驾驶以进一步提高安全性、交通流量和便利性。
社会效益和示范方面,证明 CCAM解决方案满足甚至超出用户和社会需求对于推动用户采用 CCAM至关重要。在不同地区、领域、环境中的高速公路自动驾驶演示,以证明CCAM的系统安全性、鲁棒性和互操作性是将其作为改善欧洲道路交通的有效手段;在选定的辅助走廊进行演示,以证明具有基础设施支持的高度自动驾驶解决方案的社会效益和用户效益。
高速公路和走廊的典型用例包括堵车自动驾驶、高速公路自动驾驶、安全自动跟车和仓到仓运输。其主要促成因素在于具备L2-L4能力的经济型车辆、完善的基础设施、高效且完善的验证体系。
标准化方面,该领域有赖于自动驾驶相关功能、车辆、基础设施和通信技术的标准化,包括V2X 的连接接口(例如 ITS-G5、LTE 和 5G 技术)、基础设施的功能安全、车辆和基础设施感知性能的共同评估、“安全停车区域”的规则和原则。
法规方面,该领域有赖于辅助走廊中L3‑L4级自动驾驶安全运行以及不同欧洲成员国中联网车辆自动驾驶测试的统一法规。
2、限制区域
限制区域通常通过周界保护和大门防止未经授权的车辆和人员进入,其中可能出现人驾驶车辆和自动驾驶车辆的混合交通,车辆通常也以较低的速度运行,也可能有特定的交通法规。
该领域的发展动机在于封闭区域非常适合更早引入L4级车辆,降低未经授权的交通风险、提高生产力,降低 ODD 复杂性。
限制区域的典型用例包括L4自动泊车、L4低速摆渡车、L4客车在公共汽车站的自动驾驶以及L4无人驾驶卡车在场站/枢纽的自动运行。
限制区域的示范活动需进一步确保感知的可靠性和安全性,推进欧洲对限制区域用例的统一以进一步降低成本并加快部署。其主要促成因素在于可实时连接的L4级车辆、完善的基础设施(实时交通控制和监测、高带宽低延迟网络连接、性能冗余机制)、交通系统整体功能安全及高效的验证工具链。
标准化方面,该领域有赖于连接性和 C‑ITS 接口、基础设施功能安全、交通控制和监测、车辆和基础设施感知性能协同评估的标准化。
此外还需要限制区域运营安全相关法规。
3、城区混合交通
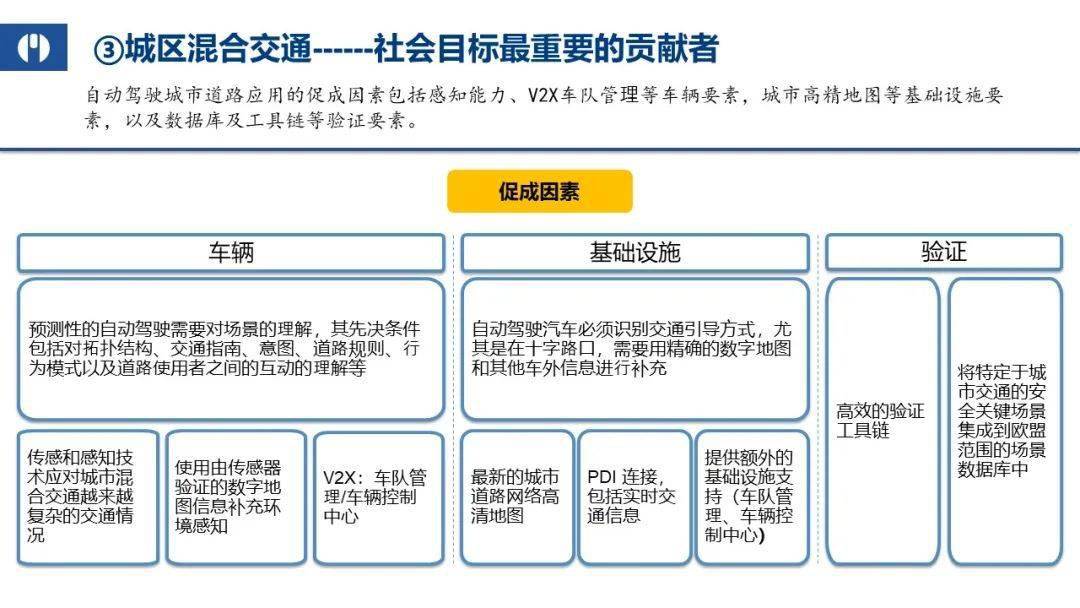
该路线图认为在城区混合交通的自动驾驶应用是实现社会目标的最重要组成部分,关键问题是如何将自动驾驶集成到多式联运系统中。在这十年内,在城市中引入自动驾驶将是可行的,至少在受限的应用中是可行的,比如在其他交通受限的专用路线,但是系统能够完全独立处理所有复杂城市交通状况需要更长时间。该领域的发展动机在于提升交通安全性,交通效率,环保性以及社会包容性。
城区混合交通的用例将根据非常明确的ODD(通常是低速)和特定功能的基础设施需求逐步进行,包括自动泊车、低速封闭区域等受限应用,专用车道,最后一英里人员和货物运输,混合交通环境下的预定路线巴士,特定路网中柔性路线出租车运营。
其主要促成因素包括感知能力、V2X车队管理等车辆要素,城市高精地图等基础设施要素,以及数据库及工具链等验证要素。
标准化方面,该领域有赖于测试程序和等级的标准化,并在标准化物理和数字基础设施(Physical and Digital Infrastructure ,PDI)概念和一般要求下对PDI支持L4的具体要求进行标准化。
法规方面,该领域有赖于L4车型的型式认证和交通规则的国际法规,并简化和协调L4级自动驾驶测试示范豁免程序。
4、农村地区
农村地区的自动驾驶发展是该路线图认为兼备高速行驶和复杂交通状况的最大挑战。路线图针对农村地区的道路自动化提出两步走的方式:在短期内,利用现有CAV系统优势,在不受ODD限制的情况下,改善农村环境道路安全,对于成熟的技术,重点放在增加市场占有率和扩展功能上,与此同时未来几年可能有进一步发展技术和相关监管的空间;从长远来看,高度自动化的移动解决方案需要在 2030 年之前加速,包括人员和货物服务,例如最后一英里服务以及共享和公共交通的相关商业案例。
用例方面,AEB、LDW、ACC以及转向和车道保持辅助系统是农村道路较低自动驾驶水平的典型用例,在预定路线运行的无人驾驶共享和公共接驳车以及垃圾收集等自动驾驶市政服务作为高度自动驾驶的早期用例在农村地区具有巨大潜力,最后一英里配送服务则可能是农村地区具有早期技术可行性和经济可行性的使用案例。其主要促成因素在于商业应用相关系统和功能接入,低成本和低基础设施依赖型的车辆,农村公路地图信息、交通信息和非固定基础设施,以及虚拟验证和场景库等验证要素。
标准化方面,该领域有赖于测试程序和等级的标准化,界面、组件和工具的标准化,并在标准化PDI概念和一般要求下对PDI支持农村地区高级别自动化的具体要求进行标准化。
法规方面,该领域有赖于调整现有全球范围监管框架以适应低级别自动驾驶技术,提供财政等激励措施增加低级别自动驾驶市场占有率,高级别自动驾驶国际法规,简化和协调L4级自动驾驶测试示范豁免程序。
作者:国家智能网联汽车创新中心 法规标准部 姜昊、贾铄、李晓龙
来源:智能交通技术(微信公号ID:ITSTech)






》(二):2040展望-完全自动化的穿梭巴士和送货服务")





隐形冠军论坛即将在京开幕!亮点抢先看——")









评论排行