
ERTRAC更新发布《网联、协作和自动化出行路线图(征求意见稿)》(二):2040展望-完全自动化的穿梭巴士和送货服务
【第一对焦:汽车驾驶自动化】
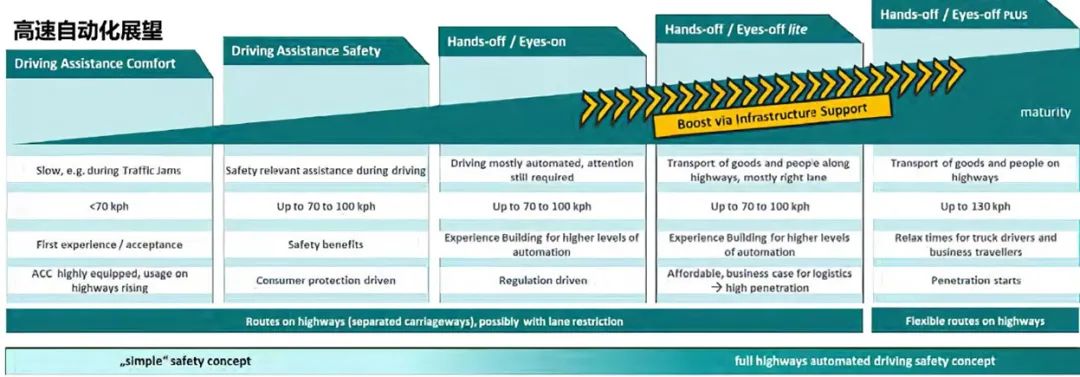
1:高速应用方面,走廊将进一步使高速公路用例能够应对高速的挑战。启用走廊后, 需要为高速公路 ISAD 应用制定标准,包括在天气条件、路面质量以及基于AI的交通交互决策方面进一步增加ODD。ISAD-A等级的走廊将能够处理交通密度,包括热点地区的安全效益。物理基础设施(如停车区)需要与 ISAD 的增加同步发展。在特定空间/时间将设定公共汽车和卡车车队的专用车道和走廊。
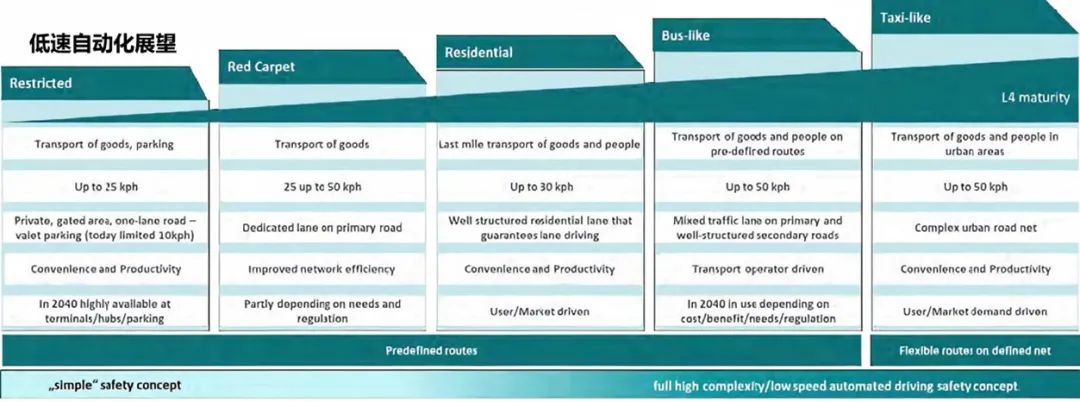
2:低速应用方面,相关用例将进一步发展和结合以应对复杂性交通的挑战。限制区域不断扩大并融合,以提供完全自动化的穿梭巴士和送货服务。城市场景下的各种用例将获得高市场占有率。
欧洲ERTRAC《网联、协作和自动化出行路线图(征求意见稿)》(下)
路线图概述
自2015年发布Automated Driving Roadmap以来,欧盟道路交通研究咨询委员会(European Road Transport Research Advisory Council, ERTRAC)持续对自动驾驶路线图进行修正与更新。2021年9月,在2019版Connected Automated Driving Roadmap基础上,ERTRAC更新发布《网联、协作和自动化出行路线图(征求意见稿)》(Connected, Cooperative and Automated Mobility Roadmap, DRAFT for public consultation)。
ERTRAC 路线图的主要目标为就欧洲网联、协作和自动化出行的长期发展提供利益相关者的联合观点。新版路线图提出面向2050年的长期愿景,明确为实现这一长期愿景需要采取必要的短期行动——2030规划和 2040展望。
三、2040展望
基于2030 规划和欧洲地平线(Horizon Europe)计划的实施,ICV应用将扩大并进步,路线图认为这将是技术成熟的十年,自动驾驶将更大规模地造福社会。公共采购将达到欧洲内部的共同要求,并且达到全球通用的鲁棒性和安全水平;基于巨大数据湖的人工智能概念将广泛应用于感知;社会道德方面将具有高优先级的问题来解决,需要开发满足广泛群众出行需求的出行解决方案。 路线图分别给出这10年中自动驾驶在高速和低速场景中的展望。 高速应用方面,走廊将进一步使高速公路用例能够应对高速的挑战。启用走廊后, 需要为高速公路 ISAD 应用制定标准,包括在天气条件、路面质量以及基于AI的交通交互决策方面进一步增加ODD。ISAD-A等级的走廊将能够处理交通密度,包括热点地区的安全效益。物理基础设施(如停车区)需要与 ISAD 的增加同步发展。在特定空间/时间将设定公共汽车和卡车车队的专用车道和走廊。
低速应用方面,相关用例将进一步发展和结合以应对复杂性交通的挑战。限制区域不断扩大并融合,以提供完全自动化的穿梭巴士和送货服务。城市场景下的各种用例将获得高市场占有率。
四、关键推动因素
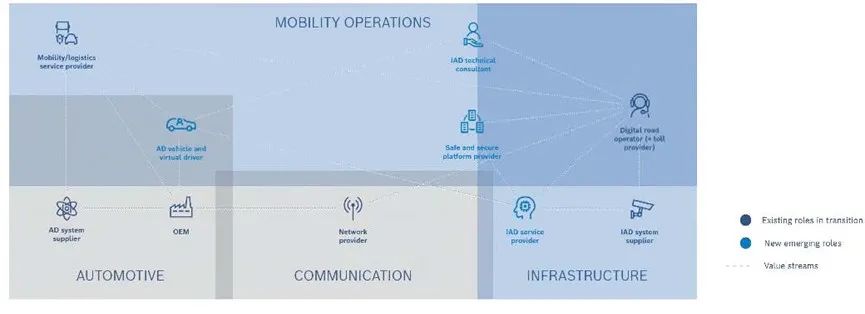
在网联和自动驾驶汽车中,将驾驶任务从人暂时或完全移交给机器,环境感知、决策和控制系统需要达到目前无法实现的高安全和性能标准。因此,使能技术的进步对于CCAM 更广泛的市场部署至关重要。路线图总结了基础设施及商业模式、技术、测试验证、AI和数据四个关键推动因素。 基础设施及商业模式方面,路线图认为未来的交通管理将必须在个体车辆连接和数据共享选项方面充分利用CCAM 选项解决车队问题,需出台车辆/车辆组颗粒级的交通法规并建立完善且长效的基础设施支持。ODD 相关需求可能会随车载传感器、软件和人工智能技术相应发展。由于物理设施投资成本高,基础设施支持水平的提高可能会集中在数字基础设施方面。CCAM 生态系统中参与者呈现合作且竞争的状态,各方在系统的基础部分进行合作,而在价值网络的其他元素上进行竞争,并创造新的角色和潜在的利益相关者。
技术推动方面,关键技术基于车载技术、自动驾驶工具链(用于开发、测试和验证的技术和流程)、云和后台技术三大重要领域。同时必须满足设计、验证和持续改进满足功能安全要求的数据驱动的复杂软件主导系统的挑战。 测试验证方面,虚拟验证需求主要面向公众广泛应用的自动驾驶功能安全目标。使用原型车进行数百万公里的物理验证是不可持续的,但软件开发、高性能计算和数字技术领域的最新进展为广泛的仿真验证开辟了可能性。
AI和数据方面,支持接管人类驾驶员任务是AI重要的应用领域,机器学习是应对自动驾驶难以详细说明的挑战(如行人检测)的关键技术,深度学习算法关键将是证明其应对所有潜在交通情况的可靠性,对于高级别自动驾驶AI功能模块的安全性证明要求则应在普遍接受的安全策略框架内达成共识。

微信"扫一扫",分享转发
微信联盟:ERTRAC微信群、欧盟微信群、自动驾驶微信群、智能网联汽车微信群、汽车产业微信群、数字孪生微信群、人工智能微信群、商业模式微信群、机器学习微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语





》(一):2050愿景中所有新注册车辆都将实现不同级别的自动化")




隐形冠军论坛即将在京开幕!亮点抢先看——")







:“马化腾想把QQ一两百万卖给我”是谣传")





评论排行