
科研新动态|沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展
【ZiDongHua 之创新自科文收录关键词: 沈阳自动化所 机器人 柔性手术 手术机器人】
科研新动态|沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展
近日,中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Journal of Robotics Research(IJRR,中国科学院1区期刊,影响因子9.2 )线上发表。
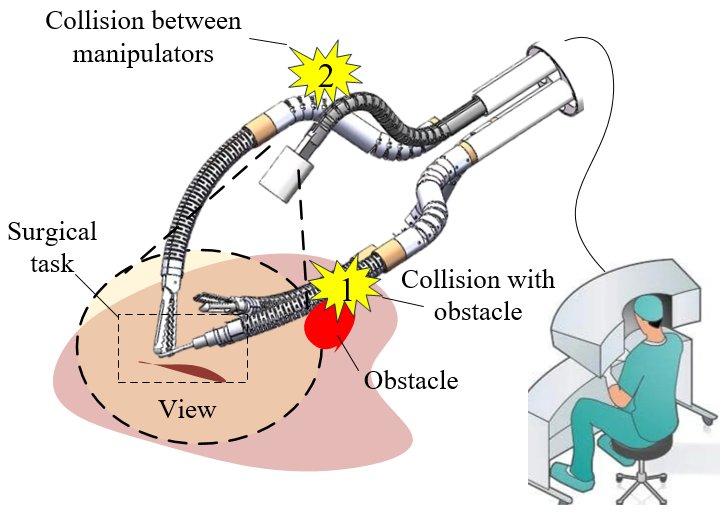
连续体手术机器人在人体腔道作业面临的挑战
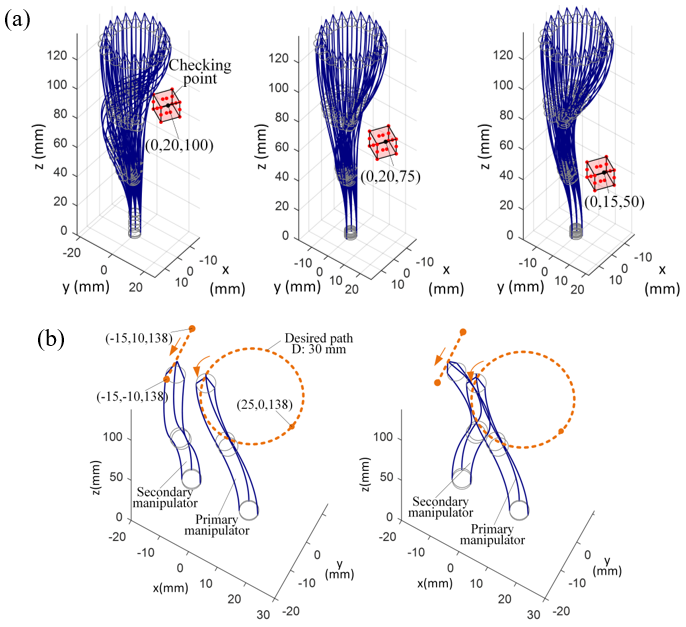
连续体机器人的主动避障
连续体机器人具有主动避障能力,作为医疗机器人在人体腔道的复杂环境中作业时,可有效避免机器人本体与人体组织或多个机器人之间的碰撞,有利于保证手术的安全与质量。然而,由于连续体机器人柔性结构与障碍环境的不规则性,表达两者之间的空间形态关系并实现主动安全交互是一个提高机器人主动避障能力的具有挑战性的问题。
为了突破上述问题,科研团队提出了一种通用的主动避障控制框架。该框架包括连续体机器人几何模型的简洁表达式,机器人与任意形状障碍物之间的碰撞检测方法,适应不同任务的避碰控制器,以及评估机器人避碰能力的评价准则。该框架为连续体机器人的安全手术提供一种有效可行的方法,并推动机器人辅助手术向更智能的方向发展。该研究得到了国家自然科学基金、国家重点研发计划、兴辽领军人才、中国科学院创新交叉团队项目的支持。
沈阳自动化所刘浩科研团队长期专注于消化、支气管、血管等人体腔道柔性手术机器人的关键技术及系统研发,先后承担了国家重点研发计划、国家自然科学基金联合重点项目等,在手术机器人的构型创成、感知、导航以及智能化等方面的研究取得了多项突破成果,消化内镜机器人等成果已经进入临床阶段。近年来多篇研究成果发表在国际学术期刊IEEE T-IE,IEEE/ASME T-MECH, IEEE TIM, IEEE Sens J, IEEE RAL,ERJ等。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:机器人微信群、柔性手术微信群、手术机器人微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)



微信联盟:机器人微信群、柔性手术微信群、手术机器人微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 解密英特尔酷睿处理器(系列1)










评论排行