
理化所集成化液态金属可变形软体机器人研究取得新进展
理化所集成化液态金属可变形软体机器人研究取得新进展
近年来,拥有高度安全性和环境适应性的软体机器人在各种应用场景中日益展现出巨大潜力。其具有如生命体系一般的柔顺灵活性,能感知环境和自身状态,以及运动顺应可控等优势,引发业界竞相探索。相较其他传感或执行器,基于电磁场调控的功能单元更具有可集成潜力,在缓解机器人臃肿躯体实现减负方面价值独特。为此,柔性线圈在软体机器人领域引人瞩目,然而由于来自其传统稀疏结构和制造技术上的挑战,限制了进一步的应用。
中国科学院理化技术研究所与北京林业大学联合团队提出了一种可变形的高密度三维曲面液态金属线圈(HD-LMC)技术,在突破了刚性线圈限制的同时,实现了柔性执行、感知与通讯功能一体化集成,为发展软体机器人技术开辟新的途径。
相应研究成果近日以Transformable 3D curved high-density liquid metal coils – an integrated unit for general soft actuation, sensing and communication为题发表在Nature Communications上,并被选为Devices专栏中50篇最佳亮点文章之一。文章第一作者为理化所21级博士生李楠,通讯作者为理化所刘静研究员和北林王磊副教授。
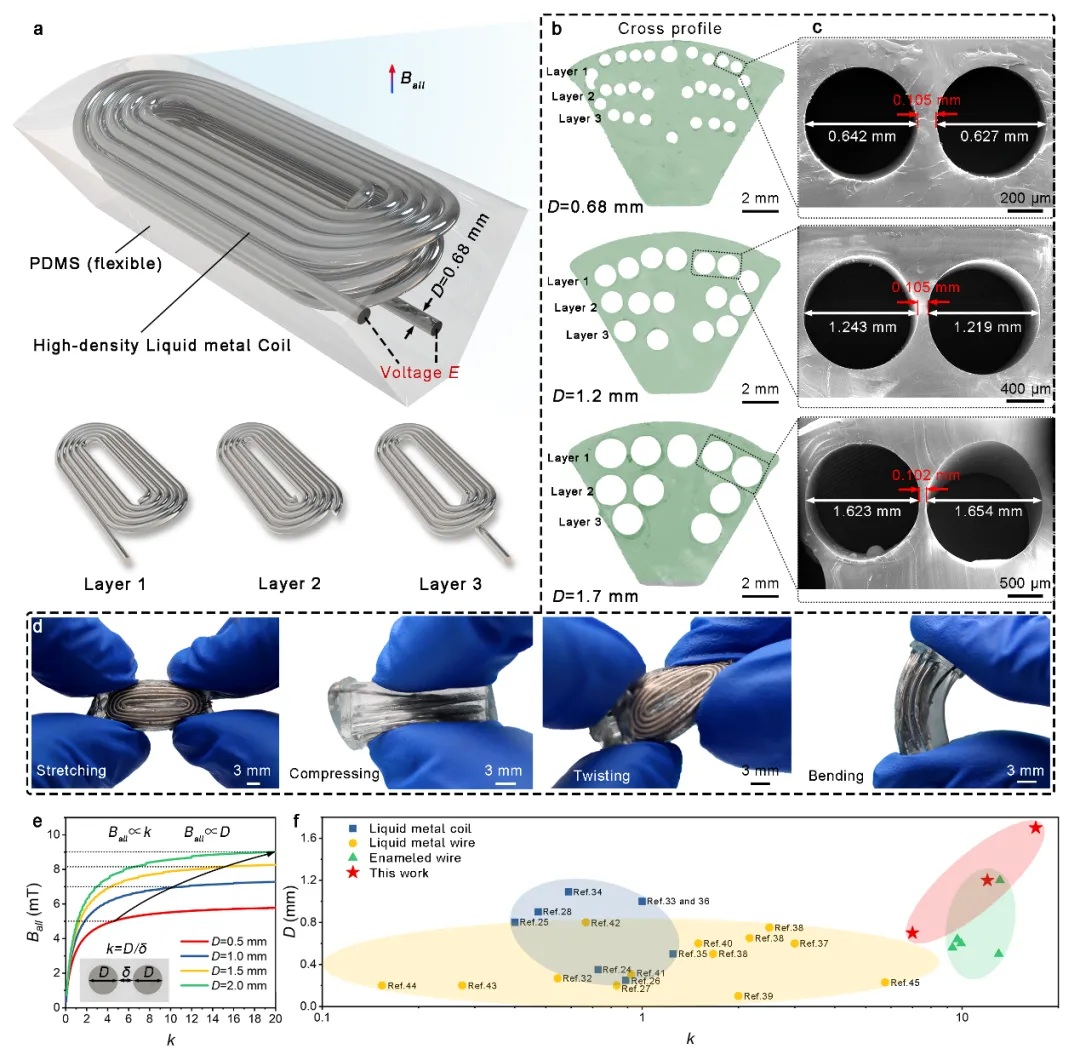
图1 高密度液态金属功能线圈集成单元的基本特性
此项研究不仅为液态金属基多维复杂柔性电子的应用提供了理论和技术基础(图1),也预示着液态金属集成机器人体系正逐步成形。HD-LMC的高密度、多功能和柔性设计的特性,使其在环境感知、通信和驱动等方面具有独特的优势(图2),未来有望在医疗、工业、农业等多个领域发挥重要作用。
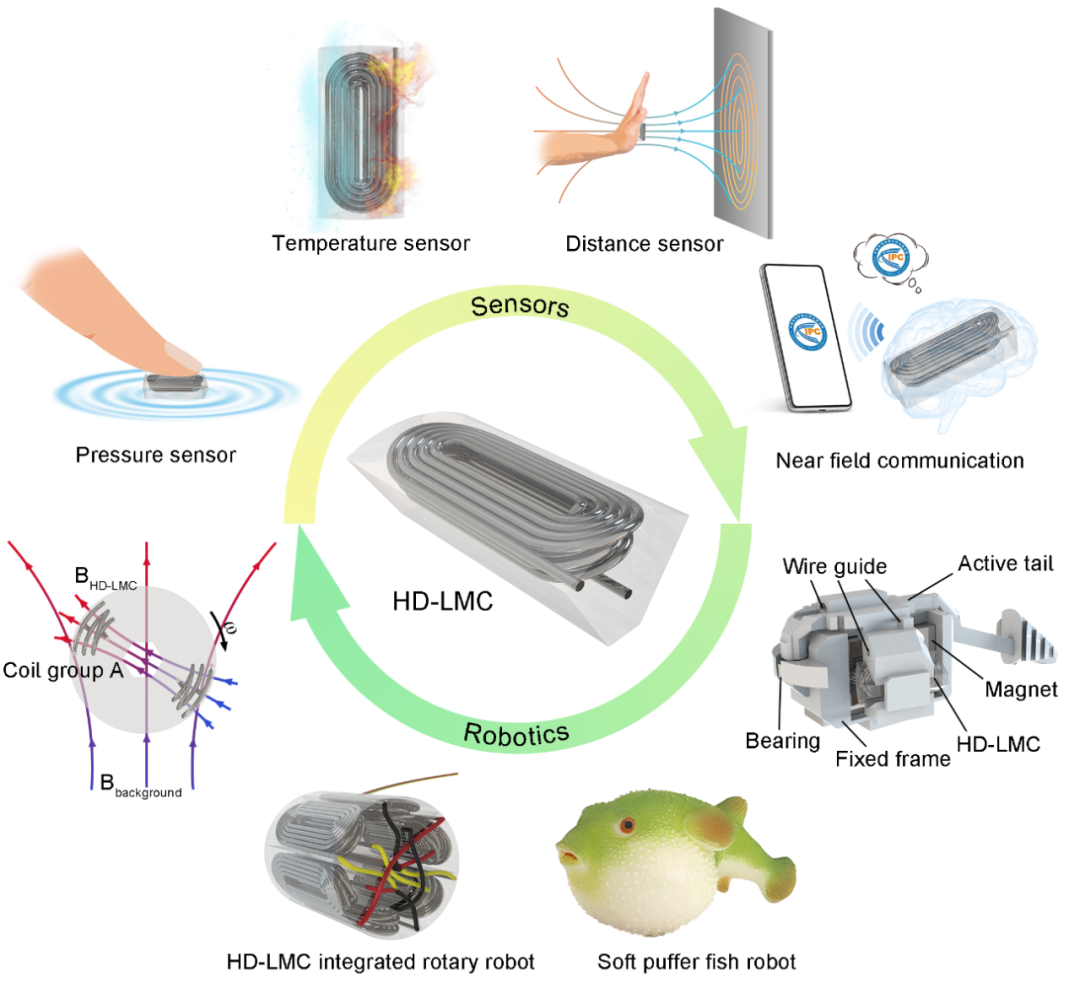
图2 液态金属高密度曲面线圈在传感执行器中具有多面手功能可集成优点
理化所刘静团队长期致力于液态金属可变形机器人探索。该团队在液态金属电控多变形现象(Adv. Mater., 2014,26,6036)以及液态金属自驱动软体机器效应(Adv. Mater., 2015, 27, 2648)等方面的发现,一度引发世界范围广泛瞩目,而研究小组关于液体集成理论的提出(AISY., 2019, 1900017),为发展集成化柔性机器人乃至研制更为复杂且贴近生活的智能机器人打开了新的视野,此次HD-LMC机器人研究和应用正是此方面的一个延续。
此前,研究小组还在多年探索液态金属可变形机器原理的基础上,系统提出了旨在构筑未来人形机器人的液态金属基本要素和设计思想,为人形机器人进一步柔性化、敏捷化以及更加类人化、智能化构建了新的发展蓝图和技术路线,相应的前瞻性评述文章以Bioinspired Liquid Metal based Soft Humanoid Robots为题发表在Advanced Materials上,并被期刊选为内背封面故事。文章第一作者为2021级博士生李楠,通讯作者为刘静研究员。
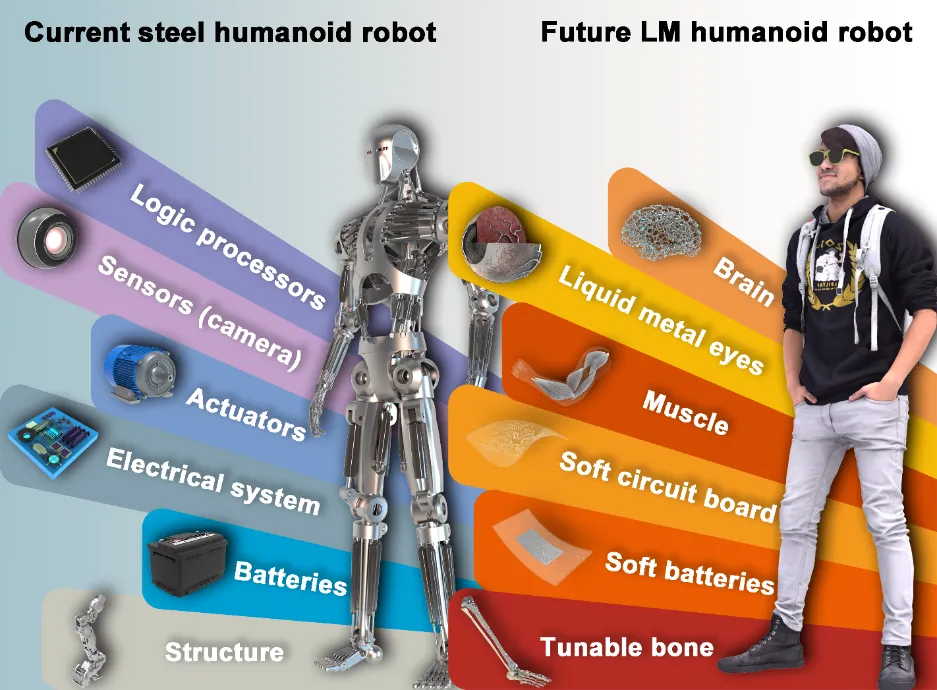
图3 未来人形机器人的进化路线
在该论文中,作者系统剖析了液态金属及其衍生功能材料在突破柔性仿生机器人技术上的巨大潜力(图3),总结了液态金属在构建类人机器人中的多面手角色——可作为柔性传感器、执行器、动力源、逻辑单元、网络系统,甚至是可变形骨骼等(图4)。
文章指出,充分集成这些组元与刚柔相济性机构,并借助液态金属的独特属性,可以开发出多功能且灵活敏捷的机器人,从而更好地满足人类需求。这一从传统金属框架向类似生物有机体的混合式软硬结构的过渡,有望在人形机器人设计与制造领域引发新的变革。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:北京林业大学微信群、可变形软体机器人微信群、传感器微信群、执行器微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:北京林业大学微信群、可变形软体机器人微信群、传感器微信群、执行器微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语









评论排行