
重庆邮电大学李永福教授团队:外界干扰下具有异质模型结构的智能网联车辆队列协同控制
【ZiDongHua 之技术文章区收录关键词:重庆邮电大学 智能网联汽车 控制器】
重庆邮电大学李永福教授团队:外界干扰下具有异质模型结构的智能网联车辆队列协同控制

重庆邮电大学李永福教授团队:外界干扰下具有异质模型结构的智能网联车辆队列协同控制
重庆邮电大学李永福教授领衔的智能空地协同控制重庆市高校重点实验室在本刊上发表了题为“Platoon Control of Connected Vehicles with Heterogeneous Model Structures Considering External Disturbances”的研究论文。该论文在团队前期工作基础上探究了外界干扰下具有异质模型结构的智能网联车辆队列协同控制问题。结果表明,对于具有异质模型结构的智能网联车辆队列,当外部时变干扰有界时,所提的包含观测器和积分滑模控制器的分层控制框架能够实现智能网联车辆队列稳定且安全行驶。
研究背景
近几十年来,智能网联车辆队列的协同控制问题因其对道路运输的重要影响而引起了人们的广泛关注。智能网联车辆队列控制具有提高道路安全性、提升道路通行效率、降低能源消耗等诸多优点。通过先进的V2X (Vehicle-to-Everything)通信技术,车辆的状态信息可以发送给其他车辆。然后通过控制器的作用,可以保证队列中跟随者车辆和领导者车辆达到一致稳定的状态。
文章简介
|
01 |
问题描述 |
如图1所示,考虑N+1辆车组成的车辆队列在笔直的道路上行驶,其中包含一辆领导者车辆(定义为车辆0)和N辆跟随者车辆(定义为车辆1到N)。车辆队列还没有形成稳定的编队,即跟随者车辆的位置、速度及加速度还没有和领导者车辆达到一致性。每辆车均配备有无线通信设备用以发送、接收自身及其他车辆的状态信息。
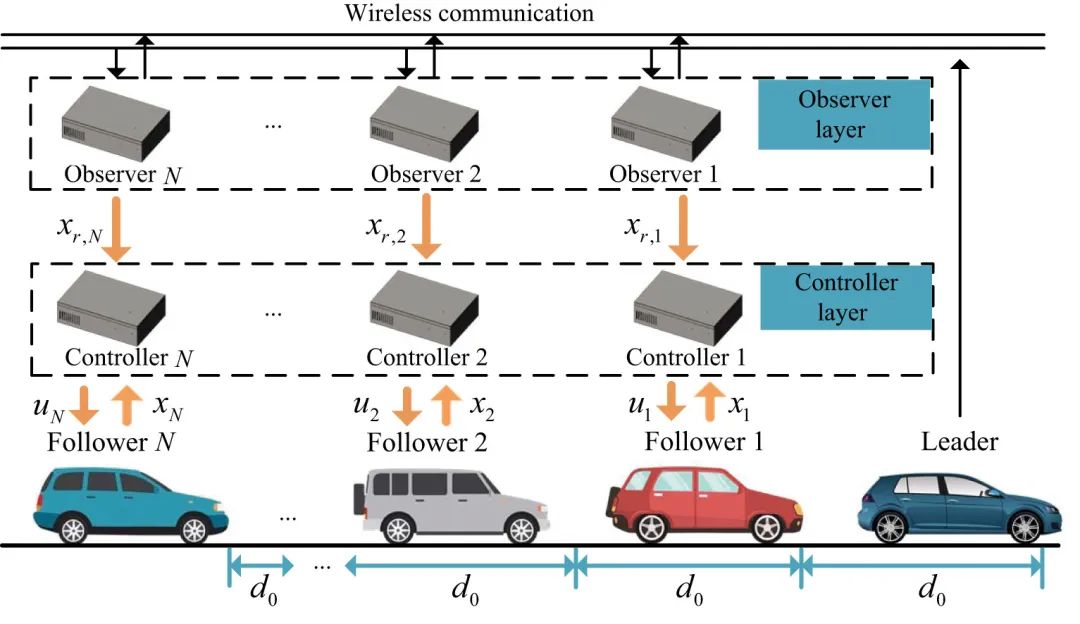
图1 分层队列控制框架

(3)
其中qi,ai表示i∈{0}UN车辆的位置、速度及加速度,ui表示控制输入,ξi表示外界干扰,τi表示车辆动力传动系统中的惯性时间常数,β1,i, β2,i为速度响应系数。
|
02 |
分层控制框架设计 |
本文设计了一种分层队列控制框架,其包括一个上层观测器和一个下层积分滑模控制器。通过V2X通信技术与邻车进行信息交互,观测器产生本地参考输入信号,即领导者车辆状态的观测值。积分滑模控制器产生控制输入以跟踪本地参考输入信号,该控制器能够消除外界干扰对智能网联车辆队列的影响。

(8)
|
03 |
研究结果 |
如图2所示,当领导者车辆的加速度不再变化时,观测误差可以快速收敛到零。观测误差峰值小于0.3,可见该观测器具有较好的观测效果。图3为控制器(5)作用下的位置图、速度图和加速度图。可以看出,车辆队列存在追尾风险并且跟随者车辆的速度和加速度一直处于抖振中。如图4所示为控制器(8)作用下的位置图、速度图和加速度图,位置图显示相邻车辆的间距可以保持在期望的安全间距。在领导者车辆第一次加速后,从速度图和加速度图可以看出跟随者车辆在时间t=130s 时能够跟踪上领导者车辆。在领导者车辆减速后,跟随者车辆在时间t=280s时能够跟踪上领导者车辆。

论文信息
原文链接:
https://www.sciencedirect.com/science/article/pii/S277315372200038X?via%3Dihub
引用格式:
Yongfu Li, Zongyu Qin, Hao Zhu, Srinivas Peeta, Xinbo Gao, Platoon control of connected vehicles with heterogeneous model structures considering external disturbances, Green Energy and Intelligent Transportation, Volume 1, Issue 3, 2022, 100038, https://doi.org/10.1016/j.geits.2022.100038.
作者简介
李永福(第一作者,通讯作者),重庆邮电大学自动化学院教授,博士生导师。国家高层次青年人才、重庆英才创新领军人才、重庆市高层次人才特殊支持计划青年拔尖人才。主要研究方向为智能网联汽车和空地协同控制。现担任“智能空地协同控制重庆市高校重点实验室”主任,“工业物联网与网络化控制”教育部重点实验室副主任,重庆市海外技术合作平台“智能网联汽车与交通国际研发中心”主任。任IEEE Transactions on Intelligent Transportation Systems等期刊副主编、编委,入选2021全球前2%科学家榜单,先后牵头荣获中国自动化学会科技进步一等奖和川渝产学研创新奖一等奖,并获中国公路学会科技进步二等奖。
秦宗余(第二作者),重庆邮电大学自动化学院研究生,主要研究方向为车辆队列控制。
朱浩(第三作者),重庆邮电大学自动化学院教授,主要研究方向为智能车环境感知与信息融合。
Srinivas Peeta(第四作者),佐治亚理工学院讲席教授,主要研究方向为智能交通系统与智能网联汽车。
高新波(第五作者),重庆邮电大学自动化学院教授,重庆邮电大学校长,博士生导师。国家“万人计划”科技创新领军人才,教育部长江学者特聘教授(2012-2017),国家杰出青年科学基金获得者,科技部重点领域创新团队负责人,教育部创新团队负责人,教育部科技委委员,教育部计算机类专业教学指导委员会委员,中国电子学会国际合作工作委员会副主任委员,IET、CIE、CAAI会士,IEEE高级会员。连续7年入选中国高被引学者榜单,现任十余个学术期刊的副主编、编委。曾荣获全国创新争先奖状、国家自然科学二等奖1项、省部级科学技术一等奖5项、省级教学成果特等奖1项、一等奖2项。主要研究方向为人工智能、机器学习、计算机视觉、模式识别。

微信"扫一扫",分享转发
微信联盟:智能网联汽车微信群、控制器微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语







隐形冠军论坛“‘智驭未来,绿动出行’智能网联新能源汽车产业专题活动”举办")





评论排行